a deux et trois dimensions de la particule. Mouvements relatifs.

Physique G´en´erale
Cin´ematique `a deux et trois dimensions de la
particule. Mouvements relatifs.
TRAN Minh Tˆam
Table des mati`eres
Mouvement `a deux et trois dimensions 27
R´ef´erentiels, position et d´eplacement . . . . . . . . . . . . . . . . . 27
Vitesses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Acc´el´erations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Balistique 30
Position du probl`eme . . . . . . . . . . . . . . . . . . . . . . . . . 30
Equation de la trajectoire et port´ee . . . . . . . . . . . . . . . . . . 31
Mouvement circulaire 32
Le mouvement circulaire uniforme . . . . . . . . . . . . . . . . . . 32
Un premier calcul de l’acc´el´eration dans un MCU . . . . . . . . . . 33
Un deuxi`eme calcul de l’acc´el´eration dans un MCU . . . . . . . . . 33

'
&
$
%
P´eriode, vitesse angulaire . . . . . . . . . . . . . . . . . . . . . . . 34
Le mouvement circulaire non uniforme . . . . . . . . . . . . . . . . 35
Mouvements relatifs 36
La vitesse relative . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
La transformation de Galill´ee . . . . . . . . . . . . . . . . . . . . . 37
Acc´el´eration depuis deux r´ef´erentiels en translation rectiligne uni-
forme l’un par rapport `a l’autre . . . . . . . . . . . . . . . 39
Si ~u n’est pas constant... . . . . . . . . . . . . . . . . . . . . . . . 39
-2-

'
&
$
%
Mouvement `a deux et trois dimensions
Nous allons ´etendre les notions acquises au chapitre pr´ec´edent au mouve-
ment, plus g´en´eral, `a deux et trois dimesnions.
R´ef´erentiels, position et d´eplacement
Dans tout probl`eme de M´ecanique, la position d’un corps est d´efini par
rapport `a un r´ef´erentiel, comme par exemple le coin d’une chambre (la-
boratoire), la Terre et quelques “´etoiles fixes” (r´ef´erentiel g´eocentrique), le
Soleil et quelques “´etoiles fixes” (r´ef´erentiel h´eliocentrique). La position est
alors exprim´ee par rapport `a un syst`eme de coordonn´ees. Nous choi-
sissons un rep`ere cart´esien d´efini par les vecteurs orthonorm´es (ˆ
i , ˆ
j , ˆ
k).
[Le syst`eme de coordonn´ees que nous consid´erons est un syst`eme d’axes droit donn´e
par les vecteurs unit´e (ˆ
i , ˆ
j , ˆ
k) orthogonaux entre eux et dont les directions et sens
sont donn´es par la r`egle des trois doigts de la main droite.]
Dans ce rep`ere, un point mat´eriel (ou une particule) est, `a l’instant t`a la
position Pet est rep´er´e par le vecteur position :
−→
OP =~r =xˆ
i+yˆ
j+zˆ
k
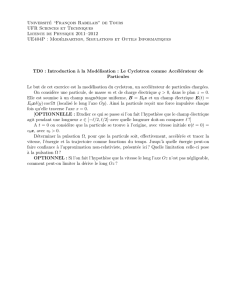
Dans son mouvement, la particule passe de P1`a P2entre les instants t1et
t2. Son d´eplacement est alors :
∆~r =~r2−~r1= (x2−x1)ˆ
i+ (y2−y1)ˆ
j+ (z2−z1)ˆ
k
∆~r = ∆ xˆ
i+ ∆ yˆ
j+ ∆ zˆ
k
Point de contrˆole Dans un rep`ere cart´esien, un papillon vole de (−2 m ,6 m ,4 m)
`a (5 m ,−3 m ,4 m). Quel est son vecteur d´eplacement ? Son d´eplacement est-il pa-
rall`ele `a un plan particulier ? Si oui, lequel ?
Vitesses
Comme pour le mouvement `a une dimension, nous d´efinissons
la vitesse moyenne :
~vmoy =∆~r
∆t=∆xˆ
i+ ∆ yˆ
j+ ∆ zˆ
k
∆t=∆x
∆tˆ
i+∆y
∆tˆ
j+∆z
∆tˆ
k
-27-

'
&
$
%
Mouvement `a deux et trois dimensions
i
^j
^
k
^
x
y
z
r1
r2
∆r
P1
P2
et la vitesse instantan´ee :
~v =vxˆ
i+vyˆ
j+vzˆ
k= lim
∆t→0
∆~r
∆t=d ~r
d t
~v =d
dt(xˆ
i+yˆ
j+zˆ
k) = dx
dt ˆ
i+dy
dt ˆ
j+dz
dt ˆ
k
Propri´et´e de la vitesse
Comme ~v =d ~r
d t = lim
∆t→0
∆~r
∆t, la vitesse ~v est tangente `a la trajectoire
(la trajectoire est la courbe d´ecrite dans l’espace par la particule ).
Invers´ement, de ~v =d ~r
d t , nous tirons la position du point mat´eriel `a
l’instant tconnaissant sa vitesse :
~r(t) = Zt
t0
~v dt =Zt
t0
vxdtˆ
i+Zt
t0
vydt ˆ
j+Zt
t0
vzdt ˆ
k
Remarque : il faut connaˆıtre la variation des composantes de la vitesse en
fonction du temps pour pouvoir int´egrer les ´equations pr´ec´edentes !
Point de contrˆole Dans un mouvement `a deux dimensions, une particule d´ecrit un
cercle centr´e sur l’origine O. Sa vitesse instantan´ee est de (3 m/s)ˆ
i−(3 m/s)ˆ
j.
Dans quel quadrant se trouve-t-elle si elle tourne dans le sens des aiguilles d’une
montre ou dans le sens inverse des aiguilles d’une montre ?
-28-

'
&
$
%
Mouvement `a deux et trois dimensions
Acc´el´erations
De la mˆeme mani`ere que pour le cas `a une dimension, nous d´efinissons
l’acc´el´eration moyenne :
~amoy =∆~v
∆t=∆vxˆ
i+ ∆ vyˆ
j+ ∆ vzˆ
k
∆t=∆vx
∆tˆ
i+∆vy
∆tˆ
j+∆vz
∆tˆ
k
et l’acc´el´eration instantan´ee :
~a =axˆ
i+ayˆ
j+azˆ
k= lim
∆t→0
∆~v
∆t=d ~v
d t
~a =d
dt(vxˆ
i+vyˆ
j+vzˆ
k) = d vx
dt ˆ
i+d vy
dt ˆ
j+d vz
dt ˆ
k
Remarque : L’acc´el´eration n’est pas tangente `a la trajectoire, sauf pour
les mouvements rectilignes.
Invers´ement, de ~a =d ~v
d t , nous tirons la vitesse du point mat´eriel `a
l’instant tconnaissant son acc´el´eration :
~v(t) = Zt
t0
~a dt =Zt
t0
axdtˆ
i+Zt
t0
aydt ˆ
j+Zt
t0
azdt ˆ
k
Remarque : il faut connaˆıtre la variation des composantes de l’acc´el´eration
en fonction du temps pour pouvoir int´egrer les ´equations pr´ec´edentes !
Point de contrˆole Dans un mouvement `a deux dimensions, les vecteurs position
des particules P et Q sont respectivement :
−→
OP =3t2+ 5 ˆ
i+ 4 t5/2ˆ
j−→
OQ = ( 2 t+ 9 ) ˆ
i+ 6ˆ
j.
Selon quelle coordonn´ee la particule P ou la particule Q a-t-elle une acc´el´eration
constante ?
Dans les expressions pr´ec´edentes, la dimension des vecteurs position est le [m`etre]
et celle du temps est la [seconde]. Quelles doivent ˆetre celles des coefficients 3, 5, 4,
2, 9 et 6 ?
-29-
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%