2. Mouvement uniformément accéléré

2. Mouvement uniform´ement acc´el´er´e
Manip 1a (Acc´el´eration nulle)
La trajectoire observ´ee est rectiligne, la vitesse est quasi constante. On peut exprimer la position
x(t) comme
x(t) = vt +x0,(1)
o`u vest la vitesse et x0est la position initiale. Par commodit´e, on pose x0= 0 `a t= 0.
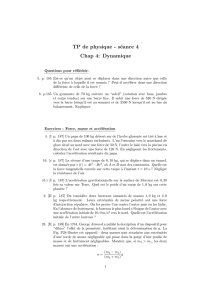
Le premier graphique de la Fig 1 montre la position en fonction du temps. Les carr´es repr´esentent
les valeurs exp´erimentales. La fonction d’ajustement est x(t) = p0∗t(On a choisi x0= 0 `a t= 0). Ici, p
signifie param`etre. x(t) = (0.50 ms−1)tet v(t) = 0.50 ms−1.
Le deuxi`eme graphique montre l’´evolution de la vitesse en fonction du temps. On obtient une vitesse
constante, c`ad une droite horizontale.
Temps (s)
0 0.2 0.4 0.6 0.8 1
Position (m)
0
0.1
0.2
0.3
0.4
0.5
0.6
/ ndf
2
χ 0.0002503 / 19
Prob 1
p0 0.00109± 0.5048
/ ndf
2
χ 0.0002503 / 19
Prob 1
p0 0.00109± 0.5048
Temps (s)
0 0.2 0.4 0.6 0.8 1
Vitesse (m/s)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
/ ndf
2
χ 0.0234 / 18
Prob 1
p0 0.008272± 0.5005
/ ndf
2
χ 0.0234 / 18
Prob 1
p0 0.008272± 0.5005
Figure 1 – Position et vitesse en fonction du temps, acc´el´eration nulle
Manip 1b (Mouvement uniform´ement acc´el´er´e)
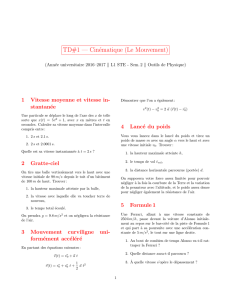
La trajectoire observ´ee est rectiligne, la vitesse varie de mani`ere lin´eaire (Fig 2). L’acc´el´eration peut
ˆetre calcul´ee comme la variation de la vitesse le long de la trajectoire, c’est donc la pente de la droite v(t).
On ajuste la fonction v(t) = p1∗t+p0. Le param`etre p0 repr´esente la vitesse initiale et p1 l’acc´el´eration.
v(t) = (1.19 ms−1)t+ 0.17 ms−1et a= 1.19 ms−2.
Sur le graphique donnant la position en fonction du temps, on a repr´esent´e la fonction
x(t) = 1
2a t2+v0t+x0(2)
o`u aet v0sont l’acc´el´eration et la vitesse initiale obtenues pr´ec´edement (on a choisi x0= 0 `a t= 0).
On observe un bon accord entre les positions mesur´ees et celles donn´ees par la relation (2).
1

Temps (s)
0 0.2 0.4 0.6 0.8 1
Position (m)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Temps (s)
0 0.2 0.4 0.6 0.8 1
Vitesse (m/s)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
/ ndf
2
χ 0.06589 / 15
Prob 1
p0 0.03078± 0.1717
p1 0.04897± 1.189
/ ndf
2
χ 0.06589 / 15
Prob 1
p0 0.03078± 0.1717
p1 0.04897± 1.189
Figure 2 – Position et vitesse en fonction du temps
Manip 2
On applique sur chacun des objets m et M la 2`eme loi de Newton :
X~
F=m·~a (3)
Les forces s’exer¸cant sur M sont son poids Mg, la r´eaction du sol oppos´ee au poids et la tension du
fil (T). On obtient donc
T=M·a(4)
Les forces s’exercant sur m sont son poids mg et la tension du fil. On obtient donc
mg −T=m·a(5)
En rempla¸cant l’expression donnant la tension du fil dans la deuxi`eme ´equation, on obtient
mg −M·a=m·a(6)
m=Ma
g−a(7)
Avec M= 100 g et a= 1.19 ms−2, on obtient m= 13.8 g, soit une valeur ´eloign´ee de celle mesur´ee
avec une balance. Cet ´ecart peut s’expliquer en partie par le fait que la masse du fil (qui n’a pas ´et´e prise
en compte) n’est pas n´egligeable par rapport `a la masse m.
2
1
/
2
100%