DS 2014 - corrigé (avril)

Epreuve finale EC P2 - 2013-2014, dur´ee 2h
Enonc´e sur 3 pages. Les calculatrices de type coll`ege, la feuille de r´esolution des ´equations
diff´erentielle ainsi qu’une feuille A4 recto de notes personnelles manuscrites sont autoris´ees. Merci
d’´eteindre et de ranger les t´el´ephones portables.
Exercice 1 : Mouvement d’un palet
Un palet de hockey sur glace, assimilable `a un point mat´eriel M de masse m, est plac´e au
sommet d’une demi-sph`ere m´etallique de rayon Rpfix´ee sur une plate-forme horizontale mobile.
On n´eglige les frottements.
La plate-forme est mise en mouvement avec une acc´el´eration horizontale a0constante. On
´etudie dans ce qui suit le mouvement r´esultant du palet, dans le r´ef´erentiel mobile R0associ´e `a la
demi-sph`ere m´etallique centr´e en O0.
1. D´ecrire en quelques lignes les caract´eristiques du mouvement du r´ef´erentiel li´e `a la demi-
sph`ere R0, par rapport au r´ef´erentiel terrestre Rsuppos´e galil´een. Sur un sch´ema clair,
indiquer les forces qui agissent sur M au temps t, pour un observateur associ´e au r´ef´erentiel
R0.
2. Exprimer, dans la base ( ~ur, ~uθ, ~uz), l’acc´el´eration du palet par rapport `a R0.
3. En appliquant le PFD au syst`eme M dans le r´ef´erentiel mobile, ´etablir, dans la base ( ~ur, ~uθ, ~uz),
les ´equations du mouvement en fonction de la variable θ, de ses d´eriv´ees temporelles, et des
donn´ees du probl`eme.
4. Exprimer l’´energie potentielle de pesanteur du syst`eme M en fonction de m,g,θet Rp.
5. En d´eduire l’´energie m´ecanique du palet par rapport `a R0en fonction de m,g,θ,˙
θet Rp.
6. Evaluer la puissance de chacune des forces autre que le poids dans la base ( ~ur, ~uθ, ~uz).
7. Etablir l’expression du th´eor`eme de la puissance m´ecanique pour un observateur situ´e dans
R0. Appliquer alors ce th´eor`eme au syst`eme M dans le r´ef´erentiel li´e au palet, et montrer que
l’on retrouve une des deux ´equations pr´ec´edentes du mouvement.
8. L’int´egration de cette ´equation conduit `a la relation suivante :
1
2Rp˙
θ2=a0sin(θ) + g(1 −cos(θ))
En d´eduire une expression de la r´eaction normale de la demi-sph`ere sur le palet, en fonction
de l’angle θ.
9. Pour quelle valeur d’angle le point Mquitte-t-il la demi-sph`ere si a0= 0 ?
10. Mˆeme question que pr´ec´edemment pour a0= 2g? Utilisez pour cela la figure en page 3
donnant l’´evolution de la fonction 3
2cos x−3 sin xen fonction de x. Comparer ce r´esultat
avec celui de la question pr´ec´edente. Est-ce coh´erent ?
1

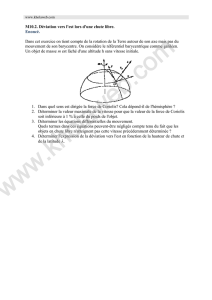
Exercice 2 : Forces d’inertie
Un motard effectue un tour de circuit sur un prototype mis au point pour l’occasion. Dans une
portion rectiligne, il atteint une vitesse de pointe constante de 296 km.h−1sur quelques centaines
centaines de m`etres et s’´ecrie : ”J’ai r´eussi `a annuler les forces d’inertie !”. Cette aventure se pro-
duit dans l’h´emisph`ere nord et on consid`ere la Terre comme un r´ef´erentiel mobile non galil´een en
rotation avec une vitesse angulaire constante autour de son axe nord-sud.
1. Enoncer les forces agissant sur le motard ? (les frottements sont n´eglig´es et on ne consid`erera
pas la force de propulsion).
2. Etablir l’expression de la force d’inertie d’entrainement en fonction du vecteur −−→
HM avec H
le projet´e de M sur l’axe de rotation de la terre.
3. Ecrire l’expression g´en´erale de la force de Coriolis.
4. D´efinir la direction et le sens du vecteur vitesse de M par rapport au r´ef´erentiel terrestre
pour que la force de Coriolis annule la force d’inertie d’entrainement.
5. En d´eduire alors le sens de d´eplacement (Nord, Sud, Ouest ou Est) de la moto pour que
l’affirmation du motard soit v´erifi´ee ainsi que la latitude du mouvement `a laquelle se produit
l’essai.
6. Passionn´e par P2, le motard joueur et intr´epide (bien que peu r´ealiste) cherche cette fois-ci
`a ce que les forces d’inertie de Coriolis et d’entrainement s’opposent `a la force d’attraction
gravitationnelle (´etat d’apesanteur). D’apr`es les r´esultats obtenus pr´ec´edemment, expliquer
qualitativement si oui ou non il est possible de r´ealiser cette exp´erience. Dans l’affirmative,
d´eterminer alors la latitude `a laquelle r´ealiser l’exp´erience ainsi que la vitesse (par rapport
au r´ef´erentiel terrestre) de la moto.
Donn´ees : G= 6,6710−11 USI, masse de la terre Mt= 5,971024 kg, rayon terrestre R= 6376
km, vitesse angulaire de rotation de la terre ωt= 7,279210−5rad/s.
2

Annexe
Figure 1 – Evolution de la fonction 3
2cos x−3 sin xen fonction de x
3

Correction exo 1 : Mouvement d’un palet
Barˆeme : 12 points
1. Le mouvement de R0par rapport `a Rest un mouvement de translation. Sch´ema doit com-
porter le poids, la r´eaction normale du support et la force d’inertie d’entrainement (le long
de ~y). (1pt)
2. −−−−−−→
a(M/R0) = d2−−−→
O0M
dt2|R0=Rp¨
θ−→
uθ−Rp˙
θ2−→
ur(1pt)
3. PFD appliqu´e au point M par rapport `a r´ef´erentiel mobile :
m−−−−−−→
a(M/R0) = ~
P+~
N+−→
Fie (1)
Pas de force de Coriolis car les deux r´ef´erentiels sont en translation.
Projection des forces :
~
P=−mg cos(θ)−→
ur+mg sin(θ)−→
uθ
~
N=N−→
ur
−→
Fie =−m−−→
aent =m ~a0~y =ma0sin (θ)−→
ur+ma0cos (θ)−→
uθ
Ainsi en projetant le PFD sur les deux axes `a partir des relations pr´ec´edentes, on obtient :
−mRp˙
θ2=−mg cos(θ) + N+ma0sin (θ) (2)
mRp¨
θ=mg sin(θ) + ma0cos (θ) (3)
(2pt : 0,5 PFD + 1 expressions forces + 0,5 projection PFD)
4. Energie potentielle de pensanteur : Ep=mgx =mgRpcos (θ) (1pt)
5. Energie m´ecanique : Em=Ec+Ep=1
2m−−−−−→
v(M/R0)2+mgRpcos (θ) = 1
2m(Rp˙
θ)2+mgRpcos (θ)
(1pt)
6. Calcul de la puissance des autres forces que le poids : seul la force d’inertie et d’entrainement
va avoir une puissance non nulle. Elle ne d´erive pas d’une ´energie potentielle. Ainsi :
P(−→
Fie)|R0=−→
Fie.−−−−−→
v(M/R0) = ma0Rp˙
θcos (θ)(4)
(1pt : 0,5 ´ecriture puissance + 0,5 application)
7. Application du th´eor`eme de la puissance m´ecanique `a partir des r´esultats pr´ec´edents :
dEm
dt |R0=P(−→
Fnc)|R0=P(−→
Fie)|R0=ma0Rp˙
θcos (θ)(5)
Or :
dEm
dt |R0=mR2
p¨
θ˙
θ−mgRp˙
θsin (θ)(6)
Ainsi, on retrouve l’´equation du PFD en projection sur −→
uθ
Rp¨
θ−gsin (θ) = a0cos (θ) (7)
(2pt : 1 ´ecriture TPC + 1 r´esolution)
8. En rempla¸cant le terme Rp˙
θde l’´equation 2 par la relation donn´ee, on obtient l’expression
de la r´eaction normale : (1pt)
N=−mRp˙
θ2+mg cos(θ)−ma0sin (θ) = 3m[gcos (θ)−a0sin (θ)] −2mg (8)
4

9. Pour que le point M quitte la demi-sph`ere, il faut que la r´eaction normale devienne nulle. Si
a0= 0 : (0,5pt)
N= 0 =⇒3gcos (θ)=2g=⇒cos (θ) = 2
3=⇒θ= 48˚ (9)
10. Dans le cas a0= 2g: (1,5pt)
N= 0 =⇒3m[gcos (θ)−2gsin (θ)] = 2mg =⇒3
2[cos (θ)−2 sin (θ)] = 1 (10)
En utilisant la figure 1, 3
2[cos (θ)−2 sin (θ)] = 1 ´equivaut `a un angle θproche de 10˚. Ce
r´esultat est coh´erent car la force d’inertie d’entrainement a tendance `a expulser le point M
de la demi-sph`ere, l’angle est donc plus faible que le cas o`u a0= 0.
Correction exo 2 : Forces d’inertie
Barˆeme : 8 points
1. Les forces agissant sur le motard sont : la force d’attraction gravitationnelle, la r´eaction du
support ainsi que les forces d’inertie d’entrainement et de Coriolis. Ces deux derni`eres forces
sont li´ees au caract`ere non galil´een du r´ef´erentiel terrestre. On d´efinit par R0le r´ef´erentiel
terrestre et Rle r´ef´erentiel g´eocentrique. (1pt)
2. −→
Fie =mω2−−→
HM (0,5pt)
3. −→
Fic =−2m−→
Ω∧−−−−−→
v(M/R0) (0,5pt)
4. La force d’inertie d’entrainement est orient´ee selon le vecteur −−→
HM . En utilisant les propri´et´es
du produit vectoriel (r`egle de la main droite), pour avoir une force de Coriolis orient´ee `a
l’oppos´ee de −−→
HM , il est n´ecessaire d’avoir un vecteur vitesse orient´e selon l’axe −→
uz. (1pt)
5. D’apr`es la r`elgle de la main droite et de la d´efinition de −→
Fic, la vitesse doit ˆetre orient´ee vers
l’ouest. D’apr`es la d´efinition du produit vectoriel :
k−→
Fick=k−2m−→
Ω∧−−−−−→
v(M/R0)k= 2mk−→
Ωkk−−−−−→
v(M/R0)ksin(π
2) (11)
Pour que les deux forces soient ´egales en norme :
k−→
Fiek=k−→
Fick ⇒ mω2−−→
HM = 2mk−→
Ωkk−−−−−→
v(M/R0)k
Ainsi :
ωR cos(λ)=2k−−−−−→
v(M/R0)k ⇒ cos(λ) = 2k
−−−−−−→
v(M/R0)k
ωR
A.N. : λ≈69,25˚(3pt : 1 calcul norme Fie + 1 calcul norme Fic + 1 calcul λ)
6. Pour que l’exp´erience soit possible, il faut que la force d’inertie d’entrainement, la force
de Coriolis et l’attraction gravitionnelle soient colin´eaires. La force d’inertie d’entrainement
´etant une force centrifuge, elle ne peut s’opposer `a l’attraction gravitationnelle qu’`a l’´equateur
soit une latitude λ= 0. A cet endroit, compte tenu de l’axe de rotation de la Terre, la force
de Coriolis sera elle aussi colin´eaire `a la force d’attraction gravitationnelle et oppos´e `a celle-ci
que si le vecteur vitesse est orient´e selon −→
uzet pointant vers l’est.
5
 6
6
1
/
6
100%