MAT231 -- Chapitre 4 : Algèbre linéaire

MAT231, Chapitre 4
MAT231 – Chapitre 4 : Algèbre linéaire
Université Joseph Fourier – 2008-2009
Pierre Bérard
1/85
MAT231, Chapitre 4
Rappels de première année
Applications linéaires, compléments
Matrice associée à une application linéaire
Changements de base
Réduction des endomorphismes, I
Groupe des permutations
Formes multi-linéaires
Déterminant
Déterminant d’un endomorphisme
Calcul des déterminants
Réduction des endomorphismes, II
2/85

MAT231, Chapitre 4
Chapitre 4, Algèbre linéaire
Dans tout ce chapitre, Kdésigne Rou C.
3/85
MAT231, Chapitre 4
Rappels de première année
Rappels de première année
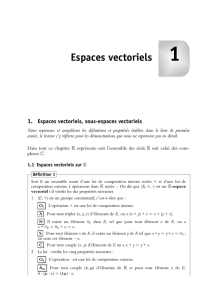
Définition (Espace vectoriel)
Soit Kun corps commutatif. Un espace vectoriel sur le corps Kest
la donnée d’un groupe commutatif (E,+), dont l’élément neutre
est noté 0E, et d’une action de Ksur E,·:K×E→E,
(λ, x)7→ λ·x(ou plus simplement λx) telle que
Ipour tous α, β ∈Ket x∈E,(α+β)·x=α·x+β·x,
Ipour tous α∈Ket x,y∈E,α·(x+y) = α·x+α·y,
Ipour tous α, β ∈Ket x∈E,(αβ)·x=α·(β·x),
Ipour tout x∈E, 1K·x=x.
4/85

MAT231, Chapitre 4
Rappels de première année
Exemples
IL’ensemble Rn, muni des opérations usuelles, l’addition des
vecteurs et la multiplication des vecteurs par un scalaire, est
un espace vectoriel sur R.
IL’ensemble Cn, muni des opérations usuelles, l’addition des
vecteurs et la multiplication des vecteurs par un scalaire, est
un espace vectoriel sur C.
IL’ensemble Mm,n(R)des matrices à mlignes et ncolonnes,
muni des opérations usuelles, addition des matrices et
multiplication d’une matrice par un scalaire, est un espace
vectoriel sur R.
5/85
MAT231, Chapitre 4
Rappels de première année
Définition
On appelle combinaison linéaire de vecteurs de Etoute somme
(finie) de la forme α1u1+· · · +αkukoù les αjsont des éléments
de Ket où les ujsont des éléments de E.
Définition
On dit qu’une famille {uj}j∈I de vecteurs de Eest une famille
génératrice si tout élément de Epeut s’écrire comme combinaison
linéaire (finie) d’éléments de la famille {uj}j∈I .
6/85

MAT231, Chapitre 4
Rappels de première année
Définition
On dit qu’une famille {uj}j∈I de vecteurs de Eest une famille libre
si, pour tout sous-ensemble fini J ⊂ I, l’égalité Pj∈J αjuj=0
implique que αj=0 pour tout j∈ J .
Définition
On dit qu’une famille de vecteurs de Eest une base de Esi elle est
libre et génératrice.
7/85
MAT231, Chapitre 4
Rappels de première année
Exemples
ILa famille e1:= (1,0,...,0),...,en:= (0,...,0,1)est une
famille libre et génératrice de Rn. C’est une base de Rn.
ILa famille {1,X,X2, . . .}est une base de l’espace vectoriel sur
C[X]des polynômes à coefficients complexes.
ILa famille {eikx }k∈Zest une famille libre dans l’espace
vectoriel sur Cdes fonctions continues de Rdans C. Elle n’est
pas génératrice.
8/85

MAT231, Chapitre 4
Rappels de première année
Proposition et Définition
Soit Aune partie non vide d’un espace vectoriel E. L’ensemble
Vect(A)des combinaisons linéaires de vecteurs appartenant à A
est un sous-espace vectoriel de E, appelé l’espace vectoriel
engendré par A. C’est le plus petit (au sens de l’inclusion)
sous-espace vectoriel de Equi contient A.
9/85
MAT231, Chapitre 4
Rappels de première année
Définition
On dit qu’un K-espace vectoriel Eest de dimension finie sur le
corps Ks’il possède une famille génératrice finie. On dit qu’un
espace vectoriel est de dimension infinie s’il n’est pas de dimension
finie.
10/85
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
1
/
43
100%