Physique. Devoir surveillé N°1.

PCSI. 01/02.
Durée 3 heures. CALCULATRICE INTERDITE.
Physique.
Devoir surveillé N°1.
Il est rappelé que votre copie est destinée à être lue et corrigée. En conséquence, une présentation claire
et lisible est recommandée. Il en sera tenu compte dans la not
ation.
Exercice 1. Mouvement d'un point matériel sur une spirale tracée sur un cône
Soit C la courbe d'équations paramétriques, en coordonnées cartésiennes
:
e
ar
z
e
r
y
e
r
x
o
o
o
sin
cos
où
a
r
o
,
sont des constantes positives
représente
l'angle entre l'axe (
O
x
) et le vecteur
OH
, où
H
est la projection de
M
sur le plan (
Oxy
).
Un point
M
se
déplace sur C.
1.
Déterminer les composantes cartésiennes des v
ecteurs vitesse et accélération ( pour cette
question seulement on considérera que
la vitesse angulaire est constante ).
En déduire l’expression du module de ces vecteurs.
2.
Déterminer la position du point
M
en coordo
nnées cylindriques d'axe (
Oz
).
3.
Déterminer l'abscisse curviligne
s
(
) . On choisira
s
(
= 0) = 0 et on orientera la courbe dans
le sens des
croissants.
4.
Déterminer le vecteur unitaire tangent
T
en un point
M
de la courbe. Ce vecteur sera orienté
dans le sens des
croissants et il sera exprimé dans la base des coordonnées cylindriques.
5.
Montrer que le vecteur
N
du
trièdre de Frenet (
T
,
B
N
,
) en un point
M
de la courbe
a pour
expression
:
)
(
2
1
r
e
e
N
.
Déterminer l
’expression du vecteur
B
.
En déduire le rayon de courbure
Rc
de C en
M .
6.
On suppose que le mouvement de
M
sur
C
est uniforme et que
(0) = 0 .
On pose
v
=
v
> 0. Déterminer la loi du mouvement
(
t
) .
Exercice 2.
Modèle mésoscopique de la conduction.
U
n
métal
, de masse volumique
,
de résistivité
et de masse atomique
M
est
en éq
uilibre thermique
.
L
es él
ectrons libres ont une vitesse m
oyenne d
’agitation
thermique qui ne sera pas considérée dans ce
qui suit.
Placés dans un champ
o
E
, ces électrons acquièrent une vitesse d
’ensemble ou de dérive
v
à travers le
métal qui exerce sur eux une action équivalente à une force de frottement fluide
v
m
F
.
1.
A la date
t
= 0,
u
n
champ
o
E
est appliqué
.
Le
mouvement
d
’
un électron de masse
m
et de
charge
–
e
est
décrit dans le cadre de la mécanique classique, dans un référentiel galiléen
Oxyz
, de
base (
z
y
x
u
u
u
,
,
), dans lequel
x
o
o
u
E
E
. On néglige l'action de la pesanteur.
Ecrire l'équation différentielle du mouvement de l'électron.
Donner la dimension de la constante
.
2.
Vérifier que l’expression suivante est solution de l’équation différentielle
:
o
t
E
e
m
e
v
)
1
(
.
Montrer que la vitesse tend vers une limite
v
, que l'
on exprimera.
Exprimer
en fonction de
le temps au bout duquel l'électron atteint cette vitesse à 99 % près.
www.kholaweb.com

3.
Le milieu est constitué par un fil cylindrique homogène de section
s
et de longueur
l
. La d.d.p.
appliqué
e à
ses bornes est constante et égale à
U
.
Déterminer l
’expression de
l
’intensité
I
qui traverse ce fil sachant que la concentration
volumique des électrons est
n*
.
4.
Déterminer l
’expression
de la résistance
R
du fil et celle de la conductivité
du métal.
5.
Dé
terminer l
’expression de
.
F
a
ire l
’
application numérique.
Données
:
-
8
m ;
3
kg.m
-
3
;
M
= 63,5 g/mol ;
m
=
-
31
kg
e
=
1,6.10
-
19
C ;
Nombre d'Avogadro :
N
a
= 6,02.10
23
mol
-
1
.
Exercice 3. Composition de deux mouvements circulaires.
Un point
A
se déplace sur un cercle C de rayon
r
, de centre
O
: C est vertical et
tourne autour d'un de
ses diamètres
(
Oz
) à la vitesse angulaire constante
. Soit
:
=
OA
Oz
,
;
l'angle entre un plan vertical fixe (
xOz
) et le plan du cercle
;
R le référentiel fixe (
Oxyz
)
R' le référentiel (
Ox’y’z’
) lié au cercle.
Tous les vecteurs seront exprimés dans la base (
'
,
'
,
'
z
y
x
e
e
e
) liée au référentiel tournant R’ sauf indica
-
tion contraire.
1.
Exprimer le vecteur position
OA
. En déduire par le calcul direct les vecteurs vitesse et
accélération de
A
dans R exprimés dans la base de R’.
2.
Exprimer
en fonction de
les vecteurs vitesse et accélération de
A
par rapport à R' dans la
base
de la base des coordonnées polaires sur le cercle, puis dans la base de R’.
3.
Déterminer la trajectoire du point coïncident
A*
de
A
dans le référentiel R . Exprimer alors la
vitesse
d'entraînement et les accélérations d'entraîne
ment et de Coriolis du point
A
.
4.
En déduire, en appliquant les lois de compo
sition des vitesses et des accélérations, les vec
-
teurs vitesse et accélération de
A
par rapport à R, exprimés dans la base de R'. M
ontrer que
l'on retrouve bien le résultat de la question 1.
www.kholaweb.com

PCSI. 01/02.
Durée 4 heures. CALCULATRICE INTERDITE.
Physique.
Devoir surveillé N°2.
Il est rappelé que votre copie est destinée à être lue et corrigée. En conséquence, une présentation claire et
lisible est recommandée. Il en sera tenu compte dans la no
tation.
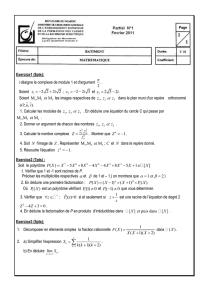
Problème 1. Analyse d’un réseau linéaire par le théorème de Thévenin.
On dispose de deux générateurs de tension de f.é.m
1
E
et
2
E
, de deux résistances
r
, et de trois résistances
R.
Avec ces élément
s on réalise le montage suivant
:
En utilisant le théorème de Thévenin, on se propose de déterminer le courant
i
circulant dans
R
entre les
points
A
et
B.
1)
Déterminer la résistance équivalente
R
eq
entre
A
et
B
.
2)
Déterminer la f.é.m équivalente
E
eq
du
générateur de Thévenin pour le circuit ouvert entre
A
et
B
. Pour déterminer cette grandeur on demande d'appliquer le théorème de Millman.
3)
Déterminer l'expression du courant
i
.
On fixe les résistances
r
, et on fait varier
R
.
4)
Pour quelle valeur de
R,
le courant
i
est
-
il maximum
? Quel est alors son expression i
max
?
www.kholaweb.com

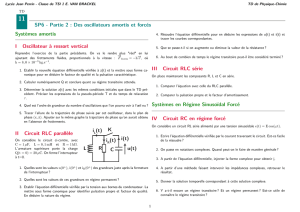
Problème 2. Mouvement d'un point matériel sur une courbe hélicoïdale
On considère un cylindre circulaire droit de rayon
r
et de hauteur 2
r
, auquel est lié un repère
orthonormé direct
O
xyz
:
Oz
est l'axe vertical du cylindre et
Oxy
est la base inférieure horizontale. La face
latérale porte un tube mince de forme hélicoïdale
HB
dans lequel se déplace un petit objet
A
de masse
m
assimilable à un point matériel. La définition paramétrique d
e la trajectoire de
A
est:
x = rcos
y = rsin
z = r
(
2
-
) avec 0 <
< 2
.
Le point
H
correspond à
= 0 et le point
B
à
= 2
.
Remarque
. Le point A subit deux forces de réaction: celle du tube hélicoïdal notée
R
et celle de la
surface latérale du cylindre circulaire q
ue l’on nomme «
réaction d’appui
»
et
notée
N
.
Le cylindre est maintenu fixe et A glisse sans frottement sous l'action de son poids
m
g
. Il est abandonné
en H sans vitesse initiale.
1)
Déterminer la loi
s
= f(
), c'est
-
à
-
dire l'abscisse curviligne
s
(
) de
A
sur sa trajectoire en
fonction de l’angle polaire
.
2)
A partir de sa définition, déterminer les composantes du vecte
ur tangentiel
t
u
de la base de
Frenet dans la base (
,
,
i j
k
) du repère
Oxyz
.
3)
Par application de la fondamentale de la dynamique (projetée judicieusement
!), montrer que la
loi horaire du mouvement, c'est
-
à
-
d
ire l'abscisse curviligne
s
(t) de A sur sa trajectoire en
fonction du temps s’écrit
:
2
1
.
2 2
s
gt
4)
Calculer le temps mis par
A
pour atteindre le point
B
et la vitesse en
B
.
On suppose que le glissement de
A
se fait maintenant avec frottement
. On admet que la valeur de la force
f
de frottement est proportionnelle à la valeur de la réaction normale au déplacement, soit
:
f R
N
avec
< 1 facteur de frottement constant. Ceci constitue la loi de Coul
omb.
5)
Calculer, en fonction de
(
t
) et de ses dérivées, l'accélération de
A
dans la base (
,
,
i j
k
) du
repère
Oxyz
.
6)
Déterminer en fonction de
r
, de
(
t
) et de ses dérivées, l'accélération de
A
dans la base de
Frenet.
7)
Exprimer, d
ans cette base, les projections des forces qui s’appliquent sur
A
.
8)
Ecrire les équations du mouvement et déduire de la loi de Coulomb l'équation différentielle
vérifiée par
.
9)
En tenant compte du résultat de la question précédente et, après avoir dét
erminé l’expression du
rayon de courbure
de la trajectoire, exprimer l’équation différentielle relative à
s
(
t
).
10)
Montrer que
(
)
s
t
croît et tend vers une limite que l’on déterminera.
www.kholaweb.com

Problème 3. Recherche de positions d’équilibre stables
.
A. Pendule simple.
On considère un point matériel
P
de masse
m
, attaché à l'extrémité d'un fil inextensible et sans masse, de
longueur
OP
=
a
, accroché en un point fixe
O
du repère terrestre. On considère le référentiel terrestre
galiléen. On considère
le champ de pesanteur uniforme:
g
= g
z
u
.
Oz
désigne la verticale
descendante
.
Soit
A
le point de
Oz
de cote
z = a
. Les mouvements de
P
sont considérés plans et repérés au cours du
temps par l'angle
=
(
,
OA
OP
).
1.
En négligeant les frottements et en appliquant le théorème du moment cinétique en
O
, établir
l'équation du mouvement en
: équation (1).
2.
En notant
o
la valeur de
dans une p
osition d'équilibre possible, écrire l'équation (2) qui
définit ces positions. Montrer que
o
peut prendre deux valeurs différentes
1
et
2
que l’on
calculera.
3.
Exprimer en fonction de
g
et
a
la pulsation
o
des petites oscillations de
P
autour de sa posi
tion
d'équilibre stable.
B. Pendule simple soumis a une force supplémentaire.
Un dispositif approprié fait que le point
B
situé sur l'axe
Oz
à la cote
b
>
a
exerce sur
P
une force
F
centrale de centre B, répulsive, de norme
2
k
r
où
k
est une constante positive et
r
la distance entre
B
et
P
.
Le fil reste tendu et inextensible de longueur
a
.
4.
On pose
3
kb
mg
. Quelle est l’unité de
?
5.
Exprimer la distance
r
en fonction de
a
,
b
, et
.
6.
Calculer le moment en
O
de la force
F
en fonction de
k, a, b,
, r
, et des vecteurs de la base
(
,
,
x y
z
u u
u
).
7.
Déterminer la nouvelle équation du mouvement en
. On l'exprimera sous la f
orme
:
2
. (
)
o
f
. Déterminer
f(
)
en fonction de
,
et
r
. Cette équation est appelée (1’).
www.kholaweb.com
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
1
/
42
100%