Exercice: Méthode des différences divisées - Interpolation

Exercice 3 (méthode des différences divisées)
Soient un intervalle [a, b]⊂R,(xi)i∈Nune suite de points deux à deux distincts de [a, b], et soit (fi)i∈Nun suite de nombres
réels. Pour n∈N∗(i≥1), on appelle pnle polynôme de degré nqui interpole les n+ 1 points du plan (xi, fi)i∈[0:n].
1. On pose p0(x)=1et a0=f0.
a. Soit p1le polynôme de d’interpolation des couples de points (x0, f0)et (x1, f1). Montrer que
p1(t) = a0p0(t) + a1(t−x0)avec a1=f1−f0
x1−x0
b. Soit p2le polynôme de d’interpolation des couples de points (x0, f0),(x1, f1)et (x2, f2). Montrer qu’il existe une
constante a2telle que,
p2(t) = p1(t) + a2(t−x0)(t−x1).
c. En déduire que le polynôme d’interpolation pndes couples de points points (xi, fi)i∈[0:n]peut s’écrire sous la forme
pn(t) = a0+a1(t−x0) + a2(t−x0)(t−x1) + · · · +an
n−1
Y
k=0
(t−xk)(1)
d- Montrer que la famille composée des n+ 1 polynômes
1, t −x0,(t−x0)(t−x1),· · · ,
n−1
Y
k=0
(t−xk)
est une base de Pn[R].
L’expression (1) du polynôme d’interpolation s’appelle forme de Newton du polynôme d’interpolation. Il s’agit maintenant
de calculer les coefficients ajen fonction des couples de points (xk, fk)k∈[0:n]. C’est l’objet des questions suivantes.
2. On introduit la notation générale
aj=f[x0, x1,· · · xj]
moyennant quoi la formule (1) se réécrit :
pn(t) = f[x0] + f[x0, x1](t−x0) + · · · +f[x0, x1,· · · , xn]
n−1
Y
k=0
(t−xj).(2)
On appelle f[x0, x1,· · · , xj]j-ième différence divisée des points (xk, fk)k∈[0:j]. Soit σune permutation des r+ 1 entiers
{k, k + 1,· · · , k +r}. Montrer que
f[xk,· · · , xk+r] = f[xσ(k),· · · , xσ(k+r)].
3. Montrer la relation de récurrence :
f[x0,· · · , xn] = f[x0,· · · , xn−1]−f[x1,· · · , xn]
x0−xn
.
4. En déduire une méthode pratique pour le calcul du polynôme d’interpolation.
1.
a. Nous introduisons le polynôme de degré 1
q=p1−a0p0.
Comme p1interpole (x0, f0),p1(x0) = f0. De plus a0=f0. Donc q(x0) = 0 si bien que x0est racine de q. Par
conséquent (t−x0)divise q. Puisque qest de degré 1on en déduit qu’il existe une constante réelle a1telle que
q(t) = a1(t−x0).
On a donc bien montré que
p1=a0p0+a1(t−x0).
Il reste à calculer la constante a1pour que p1interpole (x1, f1). On a
f1=p1(x1) = f0+a1(x1−x0).
Comme les points x1et x0sont distincts, on en déduit que
a1=f1−f0
x1−x0
.
1

b. Comme pour p1, introduisons le polynôme de degré 2,
q=p2−p1
Alors, comme p1er p2interpolent (x0, f0)et (x1, f1),p(x0) = p(x1) = 0 si bien que qest divisible par (t−x0)(t−x1).
Comme de plus x0et x1sont distincts et que qest de degré 2, il existe une constante réelle a2telle que
q(t) = a2(t−x0)(t−x1).
On a donc bien montré que
p2(t) = p1(t) + a2(t−x0)(t−x1).
Autrement dit, si on a déjà calculé le polynôme p1d’interpolation des points (x0, f0)et (x1, f1), alors le polynôme p2
d’interpolation des trois points (x0, f0),(x1, f1)et (x2, f2)peut être calculé directement en calculant a2.
c. La démonstration se fait par récurrence, l’initialisation ayant été faite aux questions 1.a et (1.b). On introduit le
polynôme
q=pn+1 −pn
qest un polynôme de degré n+ 1. De plus, pour tout i∈[0 : n],q(xi)=0. On en déduit donc qu’il existe une
constante réelle an+1 telle que
q(t) = an+1 Y
i∈[0:n]
(t−xi).
Ainsi, en utilisant l’hypothèse de récurrence,
pn+1(t) = pn(t) + an+1 Y
i∈[0:n]
(t−xi) = a0+
n+1
X
k=1
ak
Y
i∈[0:k−1]
(t−xi)
d. On montre le résultat pas récurrence :
Pn:En={1,(t−x0),(t−x0)(t−x1),· · · ,
n−1
Y
k=0
(t−xk)}est une base de Pn[R].(3)
L’initialisation pour n= 0 est triviale. Supposons Pnvraie et montrons que Pn+1 est vraie. La famille
En+1 ={1,(t−x0),(t−x0)(t−x1),· · · ,
n
Y
k=0
(t−xk)}
comporte n+2 éléments. Pour montrer que c’est une base de Pn+1[R](qui est de dimension n+ 2), il suffit de montrer
que c’est une famille génératrice. Pour cela, il suffit de montrer que les monômes (tk)k∈[0:n+1] peuvent être généré
par les fonctions de En+1. En utilisant l’hypothèse de récurrence, on sait déjà que les monômes (tk)k∈[0:n]peuvent
être générés par En⊂ En+1. Il reste juste à montrer que tn+1 peut être générée par En+1. Mais, on peut voir que
tn+1 =
n
Y
k=0
(t−xk) + woù w∈Pn[R].
En effet, le coefficient associé au monôme tn+1 dans Qn
k=0(t−xk)est égal à 1. Comme w∈Pn[R], l’hypothèse de
récurrence garantit que wpeut être généré par les fonctions de En. Ceci termine la preuve de Pn+1 .
2. Soit σ: [0 : n]7→ [0 : n], une permutation (c’est à dire une application bijective de [0 : n]dans [0 : n]). Ecrivons la forme
de Newton du polynôme d’interpolation pndes points (xi, fi)i∈[0:n]:
pn(t) = f[x0] + f[x0, x1](t−x0) + · · · +f[x0, x1,· · · , xn−1]
n−2
Y
k=0
(t−xk) + f[x0, x1,· · · , xn]
n−1
Y
k=0
(t−xk).(4)
Bien, sur comme l’ensemble des points (xi, fi)i∈[0:n]est égal à l’ensemble des points (xσ(i), fσ(i))i∈[0:n],pnest aussi le
polynôme d’interpolation des points (xσ(i), fσ(i))i∈[0:n]. Il peut donc également s’écrire sous la forme
pn(t) = f[xσ(0)] + f[xσ(0), xσ(1)](t−xσ(0)) + · · ·
+f[xσ(0), xσ(1),· · · , xσ(n−1)]
n−2
Y
k=0
(t−xσ(k)) + f[xσ(0), xσ(1),· · · , xσ(n)]
n−1
Y
k=0
(t−xσ(k)).(5)
2

Le terme de plus haut degré (associé au monôme tn+1) dans l’expression (4) est f[x0, x1,· · · , xn]. De même le terme de plus
haut degré (associé au monôme tn+1) dans (5) est f[xσ(0), xσ(1)]. Donc,
f[x0, x1,· · · , xn] = f[xσ(0), xσ(1),· · · , xσ(n)],
ce qui signifie que le nombre f[x0, x1,· · · , xn]est indépendant de l’ordre des points (xk)k∈[0:n].
3. Considérons maintenant la permutation σ: [0 : n]7→ [0 : n]donnée par
σ(i) = n−i
et écrivons la forme de Newton (5) du polynôme d’interpolation des points (xσ(i), fσ(i))i∈[0:n]pour cette permutation parti-
culière :
pn=f[xn] + f[xn, xn−1](t−xn) + · · · +f[xn, xn−1,· · · , x1]
n
Y
k=2
(t−xk) + f[xn, xn−1,· · · , x0]
n
Y
k=1
(t−xk).(6)
Identifions les termes de degré n−1dans (6) et (4) :
f[x0, x1,· · · , xn−1]− n−1
X
k=0
xk!f[x0, x1,· · · , xn] = f[x1, x2,· · · , xn]− n
X
k=1
xk!f[x0, x1,· · · , xn]
Donc,
f[x0, x1,· · · , xn−1]−f[x1, x2,· · · , xn] = f[x0, x1,· · · , xn] n−1
X
k=0
xk−
n
X
k=1
xk!=f[x0, x1,· · · , xn](x0−xn).
On retrouve bien la formule
f[x0, x1,· · · , xn] = f[x1, x2,· · · , xn]−f[x0, x1,· · · , xn−1]
xn−x0
.
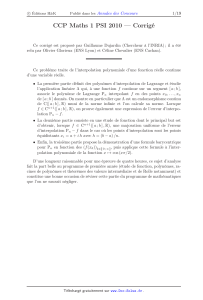
4. On résume souvent le calcul du polynôme d’interpolation par la méthode des différences divisées par le tableau représenté
sur la figure (1) (dans le cas particulier de 4 points) :
x0
x1
x2
x3
f[x0]
f[x1]
f[x2]
f[x3]
f[x0,x
1]
f[x1,x
2]
f[x2,x
3]
f[x0,x
1,x
2]
f[x1,x
2,x
3]
f[x0,x
1,x
2,x
3]
FIGURE 1 – Tableau des différences divisées associées aux 4 points (xi, fi)i∈[0:3]
Ainsi, pour calculer le polynôme d’interpolation des points (xi, fi)i∈[0:n]à partir du polynôme d’interpolation des points
(xi, fi)i∈[0:n−1] (i.e. ajouter le point d’interpolation (xn, fn)) , il suffit de calculer les n+ 1 différences divisées (n+ 1
soustractions et n+ 1 divisions)
f[xn], f[xn−1, xn],· · · , f[x0, x1,· · · , xn].
3
1
/
3
100%