Rotations

Chapitre 9 OSPH Rotation d’un corps rigide 42
9. La rotation du corps solide
9.1. La cinématique de rotation
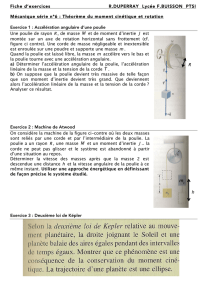
La figure représente un corps rigide tournant autour d’un
axe fixe O. Pendant un intervalle de temps donné, l’objet
tourne d’un angle
θ
Δ
. Toutes les particules se trouvant
sur la droite OA se déplacent vers leurs positions
correspondantes sur OB. Cette droite décrit un
déplacement angulaire 01
θ
θ
θ
−
=
Δ
où 0
θ
et 1
θ
sont les
positions angulaires successives. La mesure de l’angle se
fait en radians.
Le déplacement angulaire
θ
Δ
d’une particule est relié à la
longueur d’arc parcourue s :
r
s
=Δ
θ
avec r la distance de la particule à l’axe de rotation.
La vitesse du corps en rotation est caractérisée, pour l’ensemble du corps, par une vitesse de
rotation angulaire :
Vitesse moyenne : t
moy Δ
Δ
=
θ
ω
Vitesse instantanée :
θω
=
Ces vitesses se mesure en radians par seconde.
Le sens de la rotation peut-être précisé à l’aide d’une convention de
signe (positif si la rotation va dans le sens de la convention, négatif
dans le cas contraire).
La vitesse angulaire peut aussi être définie à l’aide d’un vecteur
ω
G
.
Son sens est alors donné par la règle du tire-bouchon.
La période T est la durée d’une révolution et la fréquence
ν
est le
nombre de révolutions par seconde (tr/s). Pendant une révolution, le
corps tourne de
π
2.
T
1
=
ν
et
πν
π
ω
2
2== T
A une fréquence de 1 tr/s correspond une vitesse angulaire de
π
2 rad/s.
On peut établir une relation entre le module de la vitesse linéaire d’une particule le long de
l’arc de cercle et la vitesse angulaire :
rvt
ω
=
Δθ
rs
A
B
O
ω
x
y
z

Chapitre 9 OSPH Rotation d’un corps rigide 43
Lorsque la vitesse angulaire varie, l’accélération angulaire moyenne est définie par :
t
moy Δ
Δ
=
ω
α
Et l’accélération angulaire instantanée par :
ω
α
=
9.2. Cinématique de rotation à accélération constante
Les équations de la cinématique de rotation à accélération constante sont :
θθ ω α
=+ ⋅+ ⋅
00 2
1
2
tt
ω
ω
α
=+⋅
0t
)(2 0
2
0
2
θθαωω
−⋅+=
Ces équations sont similaires aux équations du mouvement rectiligne uniformément accéléré.
9.3. Accélération centripète et accélération angulaire
D’après la théorie du mouvement circulaire, l’accélération radiale est :
r
r
v
ar2
2
ω
==
Et l’accélération (linéaire) tangentielle est vat
=
, c’est la dérivée de
la grandeur de la vitesse. En dérivant à son tour l’équation rvt
ω
=
,
on obtient :
rat
α
=
L’accélération linéaire est la somme de ces deux composantes :
tr aaa GGG +=
Comme ces deux contributions sont perpendiculaires (voir figure), le module de l’accélération
linéaire est :
22 tr aaa +=
O
t
a
r
a

Chapitre 9 OSPH Rotation d’un corps rigide 44
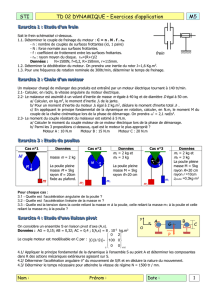
9.4. Roulement
On étudie ici le cas d’une roue de vélo.
Lorsque la roue effectue un tour, elle
couvre une distance égale à sa
circonférence pendant un temps égal à
sa période T. Le module de la vitesse du
centre de la roue est donc :
r
Tr
vc
ω
π
== 2
Cette vitesse est donc égale à la vitesse
tangentielle de la valve. Le roulement est une
combinaison d’une translation du centre et d’une
rotation autour du centre de la roue. La vitesse
d’un point quelconque de la roue est la somme
vectorielle tc vvv GGG += .
Au point le plus haut de la roue, ces deux vecteurs
sont de même sens si bien que rv
π
2=
ω
r
2r
π
9.5. Energie cinétique de rotation
Un corps rigide quelconque tourne autour d’un axe de
rotation dont la position et l’orientation restent fixes. Le
corps est constitué de particules ponctuelles de masse i
m
situées à une distance i
r de l’axe de rotation.
L’énergie cinétique d’une de ces particules est :
2
2
1iic vmE i=
avec la vitesse angulaire
22
2
1
ω
iic rmE i=
L’énergie cinétique totale de rotation est :
22
2
1
ω
∑∑ == iicc rmEE i
qui peut s’écrire sous la forme :
2
2
1
ω
IEc= avec ∑
=2
iirmI
La grandeur I est appelée le moment d’inertie du corps par rapport à l’axe donné.
2r
π
v
c
B
r
θ
v
c
v
f
v
B
r
i
m
i

Chapitre 9 OSPH Rotation d’un corps rigide 45
Le moment d’inertie d’un corps est la mesure de son inertie de rotation, c’est à dire sa
résistance à toute variation de sa vitesse angulaire.
Lorsqu’un corps tourne sur lui-même avec une vitesse angulaire
ω
autour d’un axe situé à une
distance h de son centre de masse, l’énergie cinétique est composée de deux termes.
relCM ccc EEE +=
ou bien 2
2
1
2
2
1
ω
CMCMc IMvE +=
9.6. Conservation de l’énergie mécanique
A partir du même point d’un plan incliné, de hauteur h on lâche une sphère pleine et un
disque. Sachant qu’ils roulent sans glisser, lequel des deux a la plus grande vitesse au bas du
plan incliné?
9.7. Le moment de force
Si on applique la deuxième loi de Newton à la rotation d’un corps, on fait intervenir le
moment de force. Ce moment de force est une mesure de la capacité qu’a une force
d’imprimer une rotation à un corps autour d’un axe ou d’un pivot.
Si un système est à l’équilibre, les équations suivantes sont vérifiées :
112 2
rFrF×=×
GG
GG
et 0
i
F=
∑G
G
M
rF=×
GG
G est le moment de force par rapport au pivot P. On utilisera plus fréquemment la
projection du moment de force sur un axe perpendiculaire au plan formé par les vecteurs r
G
et
F
G
P
F
G

Chapitre 9 OSPH Rotation d’un corps rigide 46
Bras de levier
Force non perpendiculaire au levier
M
rF rF
⊥
⊥
=
=
car sin
rr
⊥
=
θ
sin
FF
⊥
=
θ
Donc : sinMrF
=
θ
Exemple
Les trois forces 1
F
G, 2
F
G et 3
F
G agissent sur une
tige d'épaisseur négligeable aux positions 1
r
G
,
2
r
G et 3
r
G à partir du pivot P situé à l'une des
extrémités (figure). Déterminer le moment de
force attribuable à chaque force par rapport
au pivot.
Solution :
La convention utilisée pour le signe des moments de force est indiquée sur la figure. On
détermine le signe de chaque moment de force en tenant compte du sens dans lequel la tige
tournerait si la force donnée était la seule force exercée. On peut appliquer l'expression
sinMrF
θ
= directement. Soulignons toutefois que les angles donnés ne correspondent pas
forcément à l'angle θ entre r
G et F
G
111 11
222 22
333 33
sin(90 ) cos
sin(180 ) sin
sin(90 ) cos
MrF rF
MrF rF
MrF rF
θ
θ
α
α
φ
φ
=− °+ =−
=+ °− =+
=+ °− =+
9.8. Etude dynamique de la rotation
Un corps rigide tourne autour d’un axe.
Chaque particule le constituant subit une
force ir it
FF F
=
+
G
GG
que l’on peut projeter sur
des axes tangentiel et radial. L’accélération
tangentielle de la particule i est donnée par
it i
ar
α
=
. Le deuxième loi de Newton, sur
l’axe tangentiel est donc :
it i it i i
Fmamr
α
=
=
Le moment de force exercé sur la particule,
par rapport à l’axe est :
2
iiit ii
M
rF mr
α
==
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%