Chapitre 2

1
Chapitre 2 : Cinématique du point
Les équations du mouvement sont de manière très générale des équations différentielles du
second ordre en vertu du principe fondamental de la dynamique qui associe force et dérivée
seconde de la position (accélération). Par exemple, en coordonnées cartésiennes, on peut
avoir des équations du type :
)(),(),(
2
2ttXb
dt
Xd
tXa
dtXd
Le terme en
dt
Xd
est un terme d’amortissement, associé à la vitesse, tandis que le terme en
X correspond à une force de rappel. Le second membre correspond aux actions (forces)
extérieures au système. La dérivée seconde correspond à l’accélération. Attention, il ne
s’agit toutefois que d’un exemple.
Résoudre un problème de mécanique reviendra donc à résoudre des équations de ce type
(encore une fois, ceci n’est qu’un exemple). Il sera donc impératif de pouvoir décrire le
vecteur vitesse, le vecteur accélération et les forces dans un système de coordonnées
adapté au problème. La cinématique du point nous permet d’établir ces descriptions. Elle est
plus proche des mathématiques que de la physique !
Nous devrons:
Choisir un référentiel et/ou des coordonnées adaptés à la description du mouvement
Ecrire les équations physiques du mouvement dans ce référentiel, en utilisant par
exemple le principe fondamental de la dynamique.
Déduire ce qui est recherché (vitesse et position, valeur d’une force etc.)
Nous présentons d’abord la description de la cinématique du point dans différents systèmes
de coordonnées. Chacun d’entre eux présente un intérêt très important pour décrire, parfois
simplement, des mouvements d’apparence complexe. Il s’agit donc d’outils descriptifs (à
connaître et maîtriser parfaitement).
2.1 Coordonnées cartésiennes.
Ce sont les plus simples du point de vue mathématique, mais pas forcément du point de vue
physique. On se donne un repère
),,,( kjiO
. Un point M de l’espace est repéré par :
kzjyixOM
Nous noterons également :
z
y
x
OM
.
Le vecteur vitesse est donné par :

2
z
y
x
dt
OMd
v
Où les « points » correspondent aux dérivées par rapport au temps « t ». Un double point
correspond ainsi aux dérivées secondes. Cette notation est une notation standard voire
normalisée en physique.
Le vecteur accélération est donné par :
z
y
x
dt
vd
dt
OMd
2
2
Propriété fondamentale : Le vecteur vitesse est tangent à la trajectoire.
Corollaire : le vecteur
v
v
T
1
est le vecteur normé tangent à la trajectoire et dans le sens
du mouvement (démonstration : voir le paragraphe « trucs et astuces »).
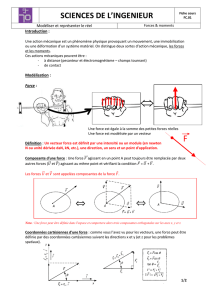
2.2 Coordonnées polaires
On se place dans le plan (x,y). Un point M de coordonnées (x,y) dans le repère
),,( jiO
peut
être également repéré par l’angle que fait le rayon vecteur
OM
avec le vecteur
i
et par la
distance radiale (le rayon)
OMr
. Soit
r
u
le vecteur normé colinéaire à
OM
et de même
sens (centrifuge par rapport à O).
Dans ce cas on peut écrire :
rurOM r
(attention à cette convention de notation)
Par définition, la vitesse angulaire est donné par :
dt
d
M
x
y
θ
r
O
u
r
u
i
j

3
Dans le repère cartésien
),,( jiO
on a également :
sin
cos
r
u
Et on retrouve ainsi la relation :
sin
cos
r
r
urOM r
Considérons maintenant le vecteur unitaire
u
perpendiculaire à
u
dans le sens direct
(trigonométrique). On a, par construction :
dud
ur
cos
sin
On a immédiatement :
r
u
dud
sin
cos
Utilité : ce second vecteur est inutile pour décrire la position mais il revêt une grande
importance pour l’expression de la vitesse et de l’accélération.
Remarque : Nous avons utilisé la notation en vecteur colonnes, qui correspond aux
coordonnées cartésiennes dans tous les cas.
En coordonnées cartésiennes, nous écrirons, par exemple, pour le vecteur
X
de
coordonnées (x,y) :
y
x
X
En coordonnées polaires, si
X
est de coordonnées (r,), nous aurons par contre
X
est de coordonnées (r,) est une expression correcte
r
urX
est une écriture correcte
r
X
est une écriture incorrecte
uurX r
est une écriture stupide.
Dérivées temporelles des vecteurs unitaires :
r
rr
u
dt
d
dud
dt
ud
u
dt
d
dud
dt
ud

4
Méthode : On obtient la dérivée d’un vecteur unitaire en le faisant tourner de 90 degrés dans
le sens trigonométrique et multipliant le vecteur obtenu par la vitesse angulaire.
Nous allons considérer le repère mobile
),,(
uuO r
Nous avons
rurOM r
Nous en déduisons la vitesse :
urur
dt
udr
dt
OMd
vr
r
Nous en déduisons l’accélération :
urrurrururururururur
dt
vd rrrr
2
22
Interprétation :
rr urv
est la vitesse radiale
urv
est la vitesse orthoradiale
rr urr
2
est l’accélération radiale
urr
2
est l’accélération orthoradiale
Résumé (à connaître ou à savoir retrouver très rapidement):
rurOM r
ururv r
urrurr r
2
2
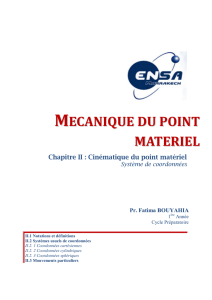
2.3 Coordonnées cylindriques
On déduit immédiatement les formules de base de la cinématique à partir de celles des
coordonnées polaires. On rajoute au plan décrit précédemment en coordonnées polaires un
axe perpendiculaire orienté selon un vecteur
k
supposé fixe pour passer en dimension 3, de
manière à ce que
),,( kuur
forme un système direct.
r
u
est défini comme précédemment, et orthogonal à
k
qui est choisi.
Il faut donc définir
u
, ce que l’on fait par :
r
uku

5
Ainsi, le vecteur position s’écrit :
kzrkzurkzjyixOM r
On déduit immédiatement, que,
k
étant supposé fixe:
kzururv r
kzurrurr r
2
2
Généralisation et dérivation:
Les vecteurs
r
u
et
k
étant définis, on obtient (on peut le prendre comme définition):
r
uku
Et par conséquent :
uuk
kuu
r
r
La dérivation des vecteurs de base est immédiate :
kk
dt
kd
ukkuu
dt
ud
uku
dt
ud
r
r
r
0
x
y
z
r
z
r
u
u
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%