mecanique i - Université Virtuelle de Tunis

Ministère de l’Enseignement Supérieur, de la Recherche Scientifique et de la
Technologie
Université Virtuelle de Tunis
1
M Hichem Trabelsi
MECANIQUE I
CINEMATIQUE DU POINT MATERIEL
Habib Bouchriha, Zeineb Benahmed, Dhouha Gamra, Ridene Saïd
Attention !
Ce produit pédagogique numérisé est la propriété exclusive de
l'UVT. Il est strictement interdit de la reproduire à des fins
commerciales. Seul le téléchargement ou impression pour un
usage personnel (1 copie par utilisateur) est permis.

Cinématique du point matériel
Le cadre spatio-temporel de la mécanique étant précisé et, pour étudier
complètement le mouvement dun point matériel, il faut se donner, en plus
du vecteur position, deux autres grandeurs cinématiques fondamentales : le
vecteur vitesse et le vecteur accélération.
Nous allons dans ce chapitre dénir ces grandeurs et les représenter dans
les trois bases cartésienne, cylindrique et sphérique ainsi que dans la base
de Frenet. Nous décrirons ensuite, sans nous préoccuper des causes qui les
provoquent, quelques mouvements particuliers que lon rencontre souvent :
les mouvements rectiligne et circulaire, le mouvement plan à accélération
centrale et le mouvement hélicoïdal.
1. 1. La vitesse
Le vocable vitesse traduit souvent une sensation intuitive que nous évo-
quons à tout moment. Elle mesure la rapidité ou la lenteur de nos actes et
atteste de notre vivacité ou de notre apathie dans lappréhension des choses
de la vie.
En physique, son sens quoique plus précis, nest pas facilement cernable
pour le non initié. Ainsi, si lon parcourt 130 km en deux heures sur la
G.P.1 pour aller de Tunis à Sousse, on dira que notre vitesse moyenne est
de 65 km=h. Mais il ne faut pas croire quon a roulé durant tout le trajet
à ce rythme. Suivant la uidité de la circulation ou létat de la route, on a
tantôt roulé à 90 km=h tantôt à 20 ou 40 km=h. En fait, ces deux chi¤res que
donne le compteur sont des vitesses instantanées et ce sont plus exactement
des modules de ces vitesses car ; en toute rigueur, il faut spécier la direction
et le sens à chaque instant, la vitesse étant une grandeur vectorielle. Ces
constatations nous permettent de formaliser progressivement les dénitions
qui suivent.

2
1.1. 1.1 Dénitions
1.1.1 1.1.1 Vitesse moyenne
Comme nous lavons vu, la notion de vitesse moyenne est une notion
utilisée couramment dans la vie quotidienne par le piéton, le cycliste, lauto-
mobiliste,... Cest le quotient dune longueur de trajet par la durée mise à le
parcourir.
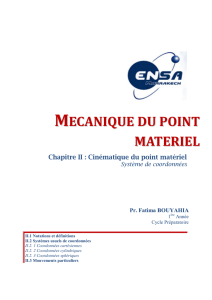
Considérons un mobile Mse déplaçant sur une trajectoire (C):
•
y
x
O
(C)
A
z
⊕
V
2
r
1
r
r∆
M
v
M1
M2
Fig.2.1. : Vitesse moyenne
Entre deux positions M1et M2, repérées par les abscisses curvilignes s1
et s2et correspondantes aux temps t1et t2, la vitesse moyenne est :
Vm=s2s1
t2t1
=s
t(1)
1.1.2 1.1.2.Vecteur vitesse moyenne
Cest un vecteur porté par la corde M1M2et déni par :
!
Vm=!
r2!
r1
t2t1
=!
r
t(2)
Il est évident que !
rne représente pas le chemin réel parcouru par le
mobile entre les positions M1et M2; le module du vecteur vitesse moyenne
est donc di¤érent de la valeur de la vitesse moyenne Vm.
1.1.3 1.1.3.Vitesse instantanée
La vitesse moyenne ne donne pas dinformations sur les variations dallure
du mobile entre les instants t1et t2,son signe précise sans plus lorientation

3
du mouvement e¤ectué dans lintervalle de temps t. Pour connaître les va-
riations dallure du mobile, il faut mesurer sa vitesse moyenne à tout instant,
donc il faut que lintervalle de temps tsoit le plus petit possible. A la limite,
lorsque t!0, on atteint :
V= lim
t2!t1
s2s1
t2t1
= lim
t!0
s
t=ds
dt
La grandeur V=ds
dt dénit la vitesse instantanée du mobile.
1.1.4 1.1.4 Vecteur vitesse instantanée
Cest un vecteur déni comme la limite du vecteur vitesse moyenne lorsque
lintervalle de temps t!0:
!
V= lim
t2!t1
!
r2!
r1
t2t1
= lim
t!0
!
r
t=d!
r
dt
Ce vecteur est porté par la tangente en Mà la trajectoire ; il peut sécrire :
!
V=d!
r
dt =d!
r
ds
ds
dt
d!
r
ds est le vecteur unitaire !
Tporté par la tangente. Il est, par
convention, orienté dans le sens de la trajectoire,
ds
dt =Vest la vitesse instantanée de sorte que :
!
V=V!
T(3)
Vest donc positif si le mouvement se¤ectue dans le sens de la trajectoire
et négatif sil se¤ectue dans le sens contraire.
1.2. 1.2 Expressions analytiques du vecteur vitesse
1.2.1 1.2.1 1.2.2.Coordonnées cartésiennes
Le vecteur position !
r=!
OM sécrit simplement en coordonnées carté-
siennes :
!
r=x!
i+y!
j+z!
k
!
i ; !
j ; !
kétant xes, il en résulte que :
!
V=d!
r
dt =dx
dt !
i+dy
dt !
j+dz
dt !
k=Vx!
i+Vy!
j+Vz!
k(4)

4
avec : 8
>
>
>
>
<
>
>
>
>
:
Vx=dx
dt
Vy=dy
dt
Vz=dz
dt
et V=p(Vx)2+ (Vy)2+ (Vz)2
1.2.2 Coordonnées cylindriques
Dans ce cas : !
OM =!
r=!
u+z!
k
Lorsque le mobile se déplace, la direction du vecteur unitaire !
uvarie de
sorte que la dérivée sécrit :
!
V=d!
r
dt =d
dt !
u+d!
u
dt +dz
dt !
k
Comme d!
u
dt =d
dt !
u,on obtient :
!
V=d
dt !
u+d
dt !
u+dz
dt !
k=V!
u+V!
u+Vz!
k(5)
avec : 8
>
>
>
>
<
>
>
>
>
:
V=d
dt
V=d
dt
Vz=dz
dt
et V=p(V)2+ (V)2+ (Vz)2
Remarque : lorsque le mouvement se¤ectue dans le plan (xOy), on aura
simplement :
!
V=V!
u+V!
u
Vest appelée "composante radiale" de la vitesse et V"composante or-
thoradiale".
1.2.3 1.2.3.Coordonnées sphériques
Le vecteur position sécrit : !
OM =!
r=r!
ur
Lorsque le mobile se déplace, la direction du vecteur unitaire !
urvarie et
le vecteur vitesse sécrit :
!
V=d!
r
dt =dr
dt !
ur+rd!
ur
dt
Comme les vecteurs unitaires !
ur;!
u;!
u'sont fonctions des coordonnées
et ',on a alors :
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
1
/
39
100%