56
Chapitre III : Technique de commande par Onduleur-SVM
Commande par DTC-SVM d’une MSAP
Chapitre III
Technique de commande par Onduleur-SVM
III-1. Introduction
La commande souvent adaptée aux convertisseurs statiques est la stratégie MLI. Plusieurs
méthodes ont été développées avec l’objectif de générer à la sortie de l’onduleur une tension sinusoïdale
ayant le moins d’harmonique possible. [20] Pour l’onduleur de notre système de commande nous
utilisons la technique de la modulation vectorielle.
Le principe de cette méthode est la détermination des portions de temps (durée de modulation) qui
doivent être allouées à chaque vecteur de tension durant la période d’échantillonnage. Cette commande
rapprochée (SVM) permet de déterminer les séquences des allumages et des extinctions des composants
du convertisseur et de minimiser les harmoniques des tensions appliquées au moteur.
Une simulation du système globale à l’aide du logiciel MATLAB/SIMULINK permet de mettre en
évidence les performances des réglages et du convertisseur à MLI vectorielle.
III-2. Principe de la SVM
Dans cette modulation on représente par seul vecteur les trois tensions sinusoïdales de sortie que
l’on désire. On approxime au mieux ce vecteur pendant chaque intervalle de modulation en agissant sur
la commande des trois jeux d’interrupteur complémentaires. Cette MLI vectorielle ne s’appuie pas sur
des calcules séparés pour chaque bras de l’onduleur mais sur la détermination d’un vecteur de contrôle
global approximé sur une période de modulation TS. [21]

57
Chapitre III : Technique de commande par Onduleur-SVM
Commande par DTC-SVM d’une MSAP
III-3. Technique de modulation vectorielle
La technique de modulation vectorielle (SVM) consiste à reconstituer le vecteur tension de
référence
s
V
pendant une période d’échantillonnage par les vecteurs tensions adjacentes
i
V
,
1i
V
,
7
V
,
0
V
(i = 0,1,...5) correspondant aux huit états possibles de l’onduleur.
2
dc
V
2
dc
V
N
1
T
a
N
Van
Vbn
Vcn
MSAP
c
b
5
T
2
T
3
T
6
T
4
T
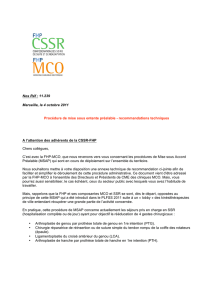
Fig. III.1 Schéma équivalent à l’onduleur de tension
Dans la figure (III.1) il est évident que la commutation des deux interrupteurs d’un même bras en
même période de temps provoque un court -circuit, donc pour éviter cette situation un seul interrupteur
par bras doit être commuté par période de temps. Il existe huit états de commutation des interrupteurs
T1,…T6.
Ces 8 états sont codés de S0 à S7 (Fig. III.2), la modulation ‘SVM’ consiste à piloter les
commutateurs PWM pour passer progressivement d’un état au suivant. Les 3 sorties a, b et c alimentent
les 3 phases du moteur qui créent des champs magnétiques déphasée de 120º.
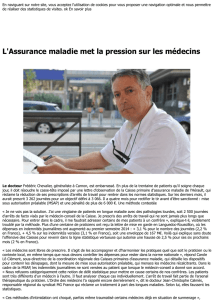
On peut alors représenter l’orientation du champ magnétique pour chacun des 8 états, ces états se
transforment alors en vecteur de tension (
0
V
à
7
V
) sur le tableau (III.1) ci-dessous.

58
Chapitre III : Technique de commande par Onduleur-SVM
Commande par DTC-SVM d’une MSAP
Les secteurs S0 et S7 ne créent pas de champs magnétique, les vecteur
0
V
et
7
V
ont donc une
longueur nulle. Les autres vecteurs ont une longueur de 1 et respectent les relations suivantes :
1
V
= -
4
V
2
V
= -
5
V
(III.1)
3
V
= -
6
V
1
V
+
3
V
+
5
V
= 0
Etats
Transistor ON
Transistor OF
Vecteurs
000
T2, T4, T6
T1 , T3 , T5
0
V
001
T2, T4, T5
T1, T3 , T6
5
V
010
T2, T3 , T6
T1, T4 , T5
3
V
011
T2, T3 , T5
T1, T4 , T6
4
V
100
T1, T4 , T6
T2, T3 , T5
1
V
101
T1, T4 , T5
T2, T3 , T6
6
V
110
T1, T3 , T6
T2, T4, T5
2
V
111
T1 , T3 , T5
T2, T4, T6
7
V
Tableau III.1 Les différentes combinaisons des transistors

59
Chapitre III : Technique de commande par Onduleur-SVM
Commande par DTC-SVM d’une MSAP
B
C
'
B
A
'
C
'
A
B
C
'
B
A
'
C
'
A
B
C
'
B
A
'
C
'
A
B
C
'
B
A
'
C
'
A
B
C
'
B
A
'
C
'
A
B
C
'
B
A
'
C
'
A
B
C
'
B
A
'
C
'
A
B
C
'
B
A
'
C
'
A
111000
011100
001110
101010
100011
110001
010101
000111
Fig. III.2 Les différentes combinaisons des transistors
Il est intéressant d’exprimer les différents états du tableau comme des vecteurs spéciaux. Les six
vecteurs actifs ainsi que les deux vecteurs nuls sont représentés sur la figure (III.2). Pour obtenir des
tensions sinusoïdales sur les phases A, B et C une complète du vecteur
s
V
doit être effectuées.

60
Chapitre III : Technique de commande par Onduleur-SVM
Commande par DTC-SVM d’une MSAP
Dans la modulation conventionnelle le vecteur
s
V
doit être dans le cercle, par contre dans le cas de
SVM, un vecteur peut être
s
V
gé néré à l’intérieur de l’hexagone par combinaison des vecteurs de
références qui délimite le secteur ou se trouve le vecteur
s
V
.
La symétrie du système triphasé, nous permet de réduire l'étude au cas général d'un secteur de 60
degrés. On se place alors dans le cas ou le vecteur de référence
s
V
est situé dans le secteur 1. Dans ce
cas, la tension de référence
s
V
dans le repère est reconstituée en faisant une moyenne temporelle des
tensions adjacentes
1
V
,
2
V
,
7
V
et
0
V
, voir la figure (III.3).
Après, il suffit de déterminer la position du vecteur de référence
s
V
dans le repère et le
secteur i dans lequel il se trouve. Pour une fréquence de commutation Ts suffisamment élevée le vecteur
d'espace de référence
s
V
est considéré constant pendant un cycle de commutation. Tenant compte que
1
V
et
2
V
sont constants et
0
V
=
7
V
= 0, il s'en suit pour un cycle de commutation:
s
T
s
V
=
1
T
1
V
+
2
T
2
V
+
0
T
7
V
+
0
T
0
V
(III.2)
Avec
T1 : Temps alloué au vecteur
1
V
T2 : Temps alloué au vecteur
2
V
T0 : Temps partagé entre les 2 vecteurs nuls
7
V
et
0
V
τ1, τ2 et τ0 : sont largueur d’impulsion.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%