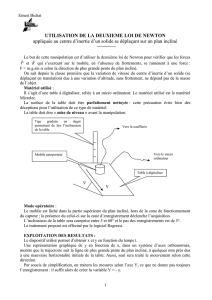
Roulement sans glissement d'un cylindre homogène I. Présentation du problème

α
O
X
Z
G
α
θ = ω
I
N
P
UyUz
Ux
T
θ
α
(O, −→
ux,−→
uy,−→
uz)
α
(G, −→
ux,−→
uy,−→
uz)

−→
P=m−→
g=−mg ·sin (α)−→
ux−mg ·cos (α)−→
uz
−→
T=T·−→
ux
−→
N=N·−→
uz
ω=˙
θ−−−→
VI,Rg =˙
θ·−→
uy∧
−→
GI =−R·˙
θ·−→
ux
−−→
VI,R =−−→
VG,R +−−−→
VI,Rg = ˙x·−→
ux−R·˙
θ·−→
ux
˙x=R·˙
θ
Ec(R)=Ec(Rg)+1
2mV 2
G,R
ω=˙
θ
Ec(Rg)=1
2IOy ·˙
θ2=1
4mR2·˙
θ2
Ec(R)=1
4m·˙x2+1
2m·˙x2=3
4m·˙x2
Ec(R)−Eco(R)=W(t)
dEc(R)
dt =p(t)
p(t) = −→
P·
−−→
VG,R +−→
T+−→
N·
−−→
VI,R
p(t)=(−mg ·sin (α)−→
ux−mg ·cos (α)−→
uz)·˙x·−→
ux=−˙x·mg ·sin (α)
dEc(R)
dt =3
4m·d˙x2
dt =3
2m·˙
x·¨x=−˙x·mg ·sin (α)

−−→
aG,R = ¨x·−→
ux=−2
3·g·sin (α)·−→
ux
Ec(R)+Ep(R)=Eco(R)+Epo(R)
Epo(R)= 0
x·sin (α)Ep(R)=mg ·x·sin (α)
3
4m·˙x2+mg ·x·sin (α) = Eco(R)
Ec(R)−Eco(R)=W(t)
3
2m·˙
x·¨x+ ˙x·mg ·sin (α) = 0
−−→
aG,R = ¨x·−→
ux=−2
3·g·sin (α)·−→
ux
−→
P+−→
N+−→
T=m·−−→
aG,R =m·¨x·−→
ux
m·¨x=−mg ·sin (α) + T
−−→
δG,R =−→
GI ∧−→
N+−→
T=−R·−→
uz∧(N·−→
uz+T·−→
ux) = −R·T·−→
uy
¨
θ
−−→
δG,R =−−−→
δG,Rg =IGy ·¨
θ·−→
uy=1
2m·R2·¨
θ·−→
uy=−R·T·−→
uy
T=−1
2m·R·¨
θ

¨x=R·¨
θ
T=−1
2m·¨x
m·¨x=−mg ·sin (α)−1
2m·¨x
−−→
aG,R = ¨x·−→
ux=−2
3·g·sin (α)·−→
ux
T=−1
2m·¨x=1
3·m·g·sin (α)
N=m·g·cos (α)
T < f ·N1
3·m·g·sin (α)< f ·m·g·cos (α)
tan (α)<3·f
IGy =2
5m·R2
1
/
4
100%