Chapitre 4 : Analyse en repères polaire, cylindrique et sphérique

Chapitre 4 :
Analyse en repères polaire,
cylindrique et sphérique
1 Repère d’espace.
cylindriques: r, , z -
zr UUU ,,
zr UzUrOM
sphériques: r, , -
UUUr,,
r
UrOM
2 Vecteurs vitesse et accélération
2.1.a Expressions du vecteur vitesse en coordonnées polaires et cylindriques.
UUU zr dt
dz
dt
d
r
dt
dr
RMV
0
/
2.1.b Expressions du vecteur vitesse en coordonnées sphériques.
UUU dt
d
r
dt
d
r
dt
dr
RMV r
sin/ 0
Ur
U
Uz
r
z
Ur
U
U
r

2.1.c Composantes du vecteur accélération en coordonnées polaires ou
cylindriques.
UUU zr dt zd
dt
d
dt
dr
dt
d
r
dt
d
r
dtrd
RMa
2
2
2
2
2
2
2
02/
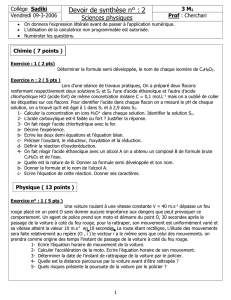
2.1.d Cas des trajectoires planes : composantes intrinsèques.
U
dt
ds
MT
dt
ds
RMV
0
/
MN
rMV
MT
dt
dV
RMa
2
0
/
Équation 1
avec
MN
vecteur unitaire directement perpendiculaire à
MT
orienté vers le centre du
rayon de courbure.
Le vecteur
r
N
est toujours dirigé vers la concavité de la trajectoire.
2.2 Mouvement de rotation autour d'un axe fixe.
HM
dt
d
rRMV
/
2.3 Mouvement de rotation quelconque.
On remarque que si l’on associe au solide S un repère R1 en rotation quelconque par rapport à
R0, la relation précédente se généralise à la dérivation du vecteur
OM
(fixe dans R1) dans le
repère d’espace R0 :
OMRR
dt
OMd
R
01 /
0
Équation 2
dtddtddtd
RR /
/
/
/'
3
2
1
où
i(t) correspond à la composante de rotation du solide suivant l’axe i.
V
T(M)
A(t=0)
r
Ux
Uy
0
Ur
U
r
V

3 Exemples de mouvements simples du point
matériel.
3.1.a Définition.
3.1.b Propriétés.
3.1.c Mouvement circulaire uniforme.
1
/
3
100%