Chapitre 6

N. DAVAL Classe de Première ES : 604
Chapitre 6
Les systèmes linéaires
1. Systèmes d'équations linéaires à deux inconnues
a. Définitions
Définition :
Un système ( S ) de deux équations linéaires à deux inconnues x et y est de la forme :
{
axbyc=0
a'xb'yc'=0
ou a,b,c,a',b',c' sont des nombres réels
Définition :
Résoudre ( S ), c'est trouver tous les couples ( x , y ) qui vérifient les deux équations
du système ( S ).
Rappels :
L'équation d'une droite est de la forme : ax + by + c = 0 ( où a et b ne sont pas
tous les deux nuls )
a) Si b ≠ 0 , ax + by + c = 0 ⇒ by = - ax + c ⇒
y
=−
a
bx
c
b
donc
–a
b
est le coefficient directeur et
c
b
l'ordonnée à l'origine.
b) Si b = 0 , ax + c = 0 et si a ≠ 0 alors
x
=−
c
a
donc la droite est verticale et passe par l'abscisse
−
c
a
1 / 10

N. DAVAL Classe de Première ES : 604
b. Interprétation graphique
Si a et b ne sont pas tous les deux nuls, et si a' et b' ne sont pas tous les deux
nuls, chaque équation correspond à une droite.
Résoudre ( S ) revient donc à trouver les coordonnées de (des) point(s)
d'intersection de ces deux droites.
Il y a donc trois possibilités :
1. Les droites sont confondues
Exemple :
(D1) : 2y + 4x – 6 = 0 et ( D2):y + 2x – 3 = 0
Si les droites sont confondues alors leurs coefficients directeurs et leur
ordonnées à l'origine sont identique donc :
a
b
=
a '
b '
et
c
b
=
c '
b '
et donc si ab' = a'b et cb' = c'b les droites sont confondues.
Conclusion :
Si ab' = a'b et cb' = c'b alors
le système
{
axbyc=0
a'xb'yc'=0
admet une infinité de couples solutions
2 / 10

N. DAVAL Classe de Première ES : 604
2. Les droites sont parallèles maos non confondues
Exemple :
(D1) : y + 2x +1 = 0 et ( D2):y + 2x – 3 = 0
Si les droites sont parallèles alors leurs coefficients directeurs est identiques
donc :
a
b
=
a '
b '
et
c
b
≠
c '
b '
et donc si ab' = a'b et cb' ≠ c'b les droites sont parallèles et non confondues.
Conclusion :
Si ab' = a'b et cb' ≠ c'b alors
le système
{
axbyc=0
a'xb'yc'=0
n'admet aucune solution
3 / 10

N. DAVAL Classe de Première ES : 604
2. Les droites sont sécantes
Exemple : ( D1 ) : y – 3x + 1 = 0 et ( D2 ) : y + 2x – 3 = 0
Si les droites sont sécantes alors leurs coefficients directeur et leur
ordonnées à l'origine sont différents :
a
b
≠
a '
b '
et
c
b
≠
c '
b '
donc si ab'≠ a'b et cb' ≠ c'b les droites sontsécantes.
Conclusion :
Si ab'≠ a'b et cb' ≠ c'b
alors le système
{
axbyc=0
a'xb'yc'=0
admet un couple solution unique.
4 / 10

N. DAVAL Classe de Première ES : 604
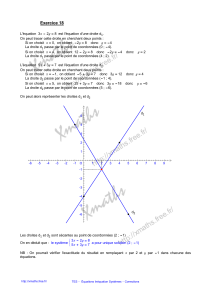
c. Méthodes de résolution
1. Méthode graphique
La méthode graphique donne rapidement le nombre de solutions mais n'est pas
très précise pour trouver le (ou les ) couple(s) solutions.
On trace les droites dont les équations sont celles du système puis on lit les
coordonnées du (des) point(s) d'intersection.
Exemples :
(1):
{
y−2 x−1=0
2 y4 x−10=0
(2):
{
yx−4=0
yx1=0
(3):
{
2 y−x−1=0
4y−2 x−2=0
2. Méthode par substitution
Elle fonctionne toujours mais les calculs sont parfois difficiles.
Le principe est d'exprimer l'une des deux inconnue en fonction de l'autre puis
de remplacer dans la deuxième équation.
Exemple :
{
y
−4
x
−7=0
−3
y
2
x
11=0
⇔
{
y
=4
x
7
−3
y
2
x
11=0
⇔
{
y
=4
x
7
−34
x
72
x
11=0
⇔
{
y
=4
x
7
−10
x
−10=0
⇔
{
y
=4
x
7
x
=−1
⇔
{
y
=3
x
=−1
Donc S = { (-1 ; 3 ) }
3. Méthode par combinaisons linéaires
On multiplie une ou les deux équation(s) par des nombres bien choisis puis on
fait la somme des deux équations pour en éliminer une des inconnues.
5 / 10
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%