PHYS PART4 CH3

PHYS PART4 CH3 Etude de cas
I) Chute verticale :
a. Libre :
Lors d’une chute verticale sans aucun frottement, le poids est la
seule force qui agit sur le solide, on peut donc dire que
ext G
G
G
G
F ma
P ma
mg ma
ga
Si on projette ces vecteurs sur Oz, on obtient :
0
int
z
z
z
z
ga
dv
gdt
dv gdt on ègre
v gt v
De même on peut également trouver la hauteur :
0
0
00
()
1/ 2 ²
dz gt v
dt
dz gt v dt
z gt v t z
On retiendra :
0z
v gt v
et
00
1/2 ²z gt v t z
Cependant, il ne faut pas oublier que la masse n’intervient pas, or sur terre, si l’on fait
tomber un marteau et un plume, on sait très bien que le marteau va descendre plus vite.
Ceci est par exemple applicable sur la lune.
b. chute verticale avec frottements :
i. comment exprimer les forces de frottement :
f hv
f h v
f hv
on enlève les vecteurs car force linéaire
²
f vv
f v v
fv
lambda est le coef de frottement turbulent.
1.
f hv
Désormais que l’on connais les forces de frottements, on peut exprimer un mouvement
soumis à des frottements :
G
F ma P f
dv
mg hv m dt
Pour simplifier l’équation, on peut assimiler le vecteur vitesse à sa
valeur, multipliée par un vecteur unitaire :
z
v v k
( !!!!!!!)
..
. . ( . . . )
( . . )
z
zz
z
z
zz
dv
mg hv m dtdvk
mgk hvk m k
dt
dv k
mg hv k m v v k
dt
dv
mg hv m k vecteur unitaire
dt
dv hv
gdt
k
kk
m
k
On retiendra donc :
zz
dv hv
gdt m


Note : On sait
zz
dv hv
gdt m
. La vitesse limite est atteinte lorsque la dérivée en nulle.
2.
f vv
On sait que le vecteur g et le vecteur v vont vers le bas.
²
. : ²
g
mg vv ma
dv
mg v m dt
et donc v v g
m
Pour connaître la solution de cette équa dif, se référer au DM.
c. Avec frottements et poussée d’Archimède :
C’est une force quie st très importante pour tous les corps flottants. On la note :
Vg
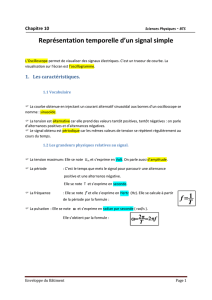
Exemple d’illustration :
Une bille tombe dans un puit. Son vecteur vitesse en fonction du temps peut être schématisé ainsi.
Dans l’air, la poussée d’Archimède est très faible du fait du
faible volume du solide. Par contre, dès que le solide entre
dans l’eau, la poussée commence réellement à agir. On a donc
deux forces opposées
On a
G
G
G
P f ma
mg hv V g ma
mg hv Vg ma
dv
mg Vg m hv
dt
La vitesse limite est atteinte lorsque la dérivée est nulle.
φ = kg.m-3 (c’est la masse volumique du solide
φ = 1000 kg.m-3 V = Volume immergé (m3)
G=9.8m.s-2
• Pour aller plus loin :
On constate que dans la formule de poussée d’Archimède, seul le volume intervient, pas la masse. Si
on prend une balle de ping pong, et une bille d’acier (volume :
3
4
3
Vr
)
Par contre, même si elle subissent la même poussée, cette dernière ne s’oppose pas avec le même poids.
Ainsi, la poussée d’archi est plus grande que le poids de la balle de Ping-Pong, alors qu’elle est
inférieure à celui de la bille d’acier.
II) Mouvement plan :
a. Mouvement de projectiles :
En physique, les repères sont les suivants :

Les coordonnées de v0 sont donc :
0
0
cos
sin
v
v
1) Equation horaire :
Si on néglige la résistance de l’air, il n’y a que le poids qui agit sur le solide.
En sachant que l’on a un axe qui est orienté vers le haut, et que g=ag (puisque les vecteurs sont
colinéaires)
On peut dire que les coordonnées du vecteur accélération sont :
0
x
y
a
ag
Si on dérive en ne perdant pas de vue les caractéristiques de v0 fixées au départ :
0
0
cos
sin
x
y
vv
vgt v
Pour avoir la position à tout instant, on intègre une seconde fois :
00
00
cos
1/ 2 ² sin
v t x
x
ygt v t y
2) Equation de la trajectoire :
Très souvent, x0=0, c'est-à-dire que l’endroit d’où on lance est l’origine des abscisses. Si on élimine le
temps, on a donc
0cos
x
tv
(retouche coordonnée abscisse)
On réinjecte dans la seconde pour avoir une équation de la trajectoire :
2
0
0
0
0
00
² tan
2 cos
sin
1/2 cos cos
v
x
y g x y
vv
g
y x x y
v

b. Etude d’un satellite terrestre
Le référentiel : On travaille dans un référentiel géocentrique pour simplifier les calculs. Un référentiel
est un solide par rapport auquel on étudie le mouvement. Il est pourvu d’une horloge et d’une base.
On se souvent de la première ou l’on a
appris le principe des forces réciproques.
²'
r
Gmm
F
ou
u
r
Gmm
F²'
Comme on utilise des valeurs numérique, on peut
rajouter sans problème un vecteur unitaire.
Ici, d’après le dessin, on voit que F et u
sont opposés. On a donc
u
r
mM
GF ²
ou M est la masse de l’asse
attracteur !!! (terre = 5.98×1024kg)
Du point de vue de la vitesse, un satellite n’a pas de moteur, il tient en orbite grâce à
F
. On suit
le satellite avec une base mobile (dite base de Freinet).
On prend donc un repère
tn
… Avec n normal et t tangent. On admettra donc :
n
r
v
t
dt
dv
mu
r
mM
G
u
r
mM
GFext
²
²
²
On voit qu’a gauche, l’on a des t, alors qu’a droite il
n’y en a pas… il y a donc 0×t à droite…
On peut donc dire que
0t
dt
dv
m
et on
simplifie par m.
r
GM
v
r
v
r
M
G
²
²
Note : G=6.67×10-11 SI. C’est la constance de gravitation universelle.
1) 3e loi de Kepler :
Pour un MCU, on sait que
Tr
t
d
v
2
T, période de révolution.
GM
r
Tr
GM
Trr
GM
Tr
²4² ²²²4
2
3
 6
6
1
/
6
100%