Chapitre 18

MPSI Chapitre 18
MOUVEMENT DANS UN CHAMP DE FORCES CENTRALES CONSERVATIVES
18-1 Mouvement à accélération centrale
18-1-1 Définition, planéité du mouvement, loi des aires
Un point matériel a un mouvement à accélération centrale de centre O, fixe dans le référentiel
considéré, si et seulement si son accélération est parallèle à son vecteur position
OM
à chaque instant.
Mouvement à accélération centrale
tOM//a
avec O fixe .
On a donc, pour ce mouvement
0aOM
. Soit le vecteur
vOMC
.
0aOMvv
dt
Cd
donc
C
est constant. (Le moment cinétique en O est constant).
OM
reste donc perpendiculaire à un vecteur constant et par conséquent le mouvement est plan.
Pendant un intervalle de temps de durée dt,
OM
balaye une surface élémentaire qui est la norme du
vecteur
2MdOM
Sd
donc la "vitesse aréolaire" est
2vOM
dt
Sd
.
Dans un mouvement à accélération centrale la vitesse aréolaire
2
C
dt
Sd
est constante. Ceci
constitue la loi des aires.
C
est la constante de la loi des aires.
18-1-2 Utilisation du théorème du moment cinétique
On arrive aux mêmes conclusions par le raisonnement suivant :
Si le mouvement de M est à accélération centrale, de centre O, M est soumis à la force totale
OM//amF
, c'est-à-dire à une force centrale (exercée par O).
Le moment en O de la force est
0FOM
O
.
Le théorème du moment cinétique appliqué en O (fixe) donne
0
dt
Ld O
O
donc le moment
cinétique en O,
vmOMLO
= m
C
est donc constant.
Oz
M
a
v
.
C
Md
.
Sd
x
r
Oz
M
a
v
.
C
Md
.
Sd
x
r

18-1-3 Formules de Binet
On utilisera les coordonnées cylindriques de M (r,,z = 0) avec Oz dans la direction et dans le sens de
C
.
On a donc
z
2
rrz erererurvOMeCC
constant donc
2
r
C
=
2
O
mr
L
.
Pour simplifier les expressions, on posera
r
1
u
,
d
du
'u
et
2
2
dud
''u
. On a donc
2
Cu
On a donc
22 u'u
u
u
r
= – Cu' donc
eCue'Cuvr
.
D'où la première formule de Binet :
2222 'uuCv
.
En dérivant la vitesse on obtient
rr eCue''Cua
les termes en
e
s'éliminent car
OM//a
.
D'où la deuxième formule de Binet :
r
22 e''uuuCa
.
18-2 Cas d'une force centrale conservative du type
rr e)r(FF
18-2-1 Énergie potentielle, conservation de l'énergie mécanique
Dans ce cas, le travail élémentaire de la force s'écrit W =
dr)r(Ferdedre)r(FMdF rrr .
et W = – dEp = Fr(r) dr donc l'énergie potentielle n'est fonction que de r .
La constante d'intégration est toujours choisie pour que
0Eplim
r
.
L'énergie mécanique de M est E = Ep(r) +
2
mv
2
1
, elle est constante.
18-2-2 Énergie potentielle effective, énergie cinétique radiale
La vitesse de M est
ererv r
et son carré est
2
2
2
2rrv
avec
2
r
C
=
2
0
mr
L
donc
2
2
2
2r
C
rv
donc l'énergie mécanique de M est
)r(Ep
r2
mC
rm
2
1
E2
2
2
, elle est la somme de deux
termes : l'un qui ne dépend que de r, comme Ep(r) et que l'on appelle "énergie potentielle effective" et l'autre
qui serait l'énergie cinétique si la vitesse était radiale (//
OM
) que l'on appelle "énergie cinétique radiale".
Énergie cinétique radiale :
2
rad rm
2
1
Ec
. On a donc Ecrad
0
.
Énergie potentielle effective :
2
2
O
2
2
eff mr2
L
)r(Ep
r2
mC
)r(EpEp
.
Énergie mécanique :
effrad EpEcE
. On a donc
EEpeff
18-2-3 Différents types de mouvements
La condition
EEpeff
, si l'on connaît l'expression de Epeff en fonction de r, permet de déterminer le
type de mouvement de M suivant la valeur de l'énergie mécanique (constante), donc suivant la valeur initiale
de E, et suivant la valeur initiale de r :
On a de toute façon
0Eplim eff
r
et, en général
eff
0r Eplim
.

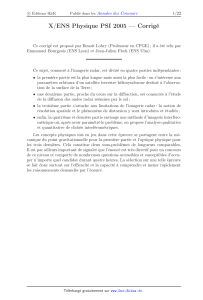
Supposons par exemple que Epeff (r) ait l'allure ci-dessous.
Pour E = E1,
],r[r 1
, M peut s'éloigner indéfiniment de O, il n'est pas lié à O.
Pour E = E2, deux cas sont possibles suivant la valeur initiale de r :
]r,r[r M2m2
si initialement r est dans cet intervalle, M est lié à O, il reste à une distance finie de O.
],r[r 2
si initialement r
r2, M n'est pas lié à O.
Pour E = E3,
]r,r[r M3m3
, M est lié à O.
Pour E = E0, r = r0, M est lié )à O et a un mouvement circulaire autour de O.
Si M peut s'éloigner indéfiniment de O, on parle d'état de diffusion.
Si M reste à une distance finie de O, on parle d'état lié.
Bien entendu, un état lié n'est possible que si la force exercée par O sur M est attractive.
18-2-4 Obtention de l'équation de la trajectoire en coordonnées polaires
On peut utiliser la deuxième loi de Newton
rr e)r(FF
= m
a
, et la deuxième formule de Binet.
Fr étant une fonction de r est aussi une fonction de u =
r
1
, donc u en fonction de est solution de
l'équation différentielle
''uuumC)u(F 22
r
ou
0''uuu
m
L
)u(F 2
2
0
r
.
La constante C ou la constante L0 est déterminée avec les conditions initiales.
18-3 Cas des forces centrales en
2
r1
: interaction gravitationnelle, interaction électrostatique
18-3-1 Expression de l'énergie potentielle, potentiel électrostatique, potentiel gravitationnel
Si M de masse m est attiré par la masse m0 placée en O fixe, M subit la force d'attraction
gravitationnelle
r
e
r
mm
OM
OM
mm
F2
O
3
OGG
, son travail élémentaire est W = – dEp = Fr dr donc
dr
r
mm
dEp 2
O
G
et, avec
0Eplim
r
,
rmm
Ep O
G
.
Le potentiel gravitationnel en M est V, défini par Ep = m V donc
r
m
VO
G
.
r
Epeff
E1
E2
0
E3
E0
État de diffusion
État lié État de diffusion
État lié r
Epeff
E1
E2
0
E3
E0
État de diffusion
État lié État de diffusion
État lié

Si M de charge électrique q est attiré ou repoussé par la charge qO placée en O fixe, M subit la force
électrostatique
r
e
r4
qq
OM
OM4
qq
F2
0
O
3
0
O
, son travail élémentaire est W = – dEp = Fr dr donc
dr
r4
qq
dEp 2
0
O
et, avec
0Eplim
r
,
r4 qq
Ep
0
O
.
Le potentiel électrostatique en M est V, défini par Ep = q V donc
r4q
V
0
O
.
Dans les deux cas, la force est centrale et inversement proportionnelle au carré de la distance au
centre, l'énergie potentielle est de la forme
r
K
Ep
et on a
2
rr
K
F
avec :
mmK 0
G
pour une interaction gravitationnelle et
0
O
4qq
K
pour une interaction électrostatique.
K > 0 pour une force de répulsion électrostatique entre deux charges de même signe.
K < 0 pour une force d'attraction électrostatique entre deux charges de signes opposés ou pour une
force d'attraction gravitationnelle.
18-3-2 Énergie potentielle effective, différents types de mouvements
Dans ces deux cas, on a donc
2
2
2
2
O
eff r2
mC
r
K
mr2
L
r
K
Ep
.
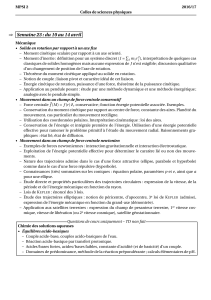
Si K > 0 : Epeff décroît de à 0 quand r croît de 0 à .
Il n'y a que des états de diffusion.
Si K < 0 : Epeff passe par un minimum négatif car
0
r
mC
r
K
dr
dEp
3
2
2
eff
pour r =
K
mC
r2
0
,
alors Epeff =
2
2
0mC2K
E
. On remarque aussi que Epeff = 0 pour
2
r
K2
mC
r0
2
.
Il y a donc différents cas :
Si E > 0 : états de diffusion.
Si E < 0 : états liés, avec le cas particulier E = E0 pour lequel le mouvement de M est circulaire, de
rayon r0.
Epeff
r
E1
r1
],r[r 1
Epeff
r
E1
r1
],r[r 1

18-3-3 Équation de la trajectoire en coordonnées polaires
Elle est donnée par l'équation différentielle
''uuumC)u(F 22
r
.
Avec
2
2
rKu
r
K
F
l'équation différentielle s'écrit :
2
mC
K
u''u
et sa solution générale est de la
forme
)cos(A
mC
K
u0
2
(avec le choix de 0 tel que A soit positif) d'où :
)cos(
K
AmC
1
K
mC
)cos(A
mC
K1
r
u
1
0
2
2
0
2
.
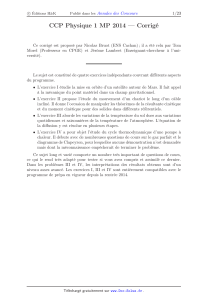
Cas d'une force attractive
Pour une force attractive, K < 0 , on a affaire à une conique d'équation
)cos(e1 p
r
0
avec :
le paramètre est
K
mC
p2
, et l'excentricité est
K
AmC
e2
, (p et e sont > 0).
Si e = 0 : cercle. Si e
[1;0]
: ellipse. Si e = 1 : parabole. Si e > 1 : branche d'hyperbole.
le cercle et les ellipses correspondent aux états liés, la parabole et les branches d'hyperbole
correspondent aux états de diffusion. La parabole correspond au cas limite.
Epeff
E0
r
rM
rmr0
2
r0
E1
E2
0r1
],r[r 1
]r,r[r Mm
Epeff
E0
r
rM
rmr0
2
r0
E1
E2
0r1
],r[r 1
]r,r[r Mm
O
P
px
0
O
P
px
0
O
P
px
0
x
0
p
O
O' b
c
a
P
A
B
Ma
x
0
p
O
O' b
c
a
P
A
B
Ma
x
0
p
O
O' b
c
a
P
A
B
Ma
 6
7
8
6
7
8
1
/
8
100%