X/ENS Physique PSI 2005 - Corrigé

c
Éditions H&K Publié dans les Annales des Concours 1/22
X/ENS Physique PSI 2005 — Corrigé
Ce corrigé est proposé par Benoît Lobry (Professeur en CPGE) ; il a été relu par
Emmanuel Bourgeois (ENS Lyon) et Jean-Julien Fleck (ENS Ulm).
Ce sujet, consacré à l’imagerie radar, est divisé en quatre parties indépendantes :
•la première partie est la plus longue mais aussi la plus facile : on s’intéresse aux
paramètres orbitaux d’un satellite terrestre héliosynchrone destiné à l’observa-
tion de la surface de la Terre ;
•une deuxième partie, proche du cours sur la diffraction, est consacrée à l’étude
de la diffusion des ondes radar réémises par le sol ;
•la troisième partie s’attache aux limitations de l’imagerie radar : la notion de
résolution spatiale et le phénomène de distorsion y sont introduits et étudiés ;
•enfin, la quatrième et dernière partie envisage une méthode d’imagerie interféro-
métrique où, après avoir paramétré le problème, on propose l’analyse qualitative
et quantitative de clichés interférométriques.
Les concepts physiques mis en jeu dans cette épreuve se partagent entre la mé-
canique du point gravitationnelle pour la première partie et l’optique physique pour
les trois dernières. Cela constitue deux sous-problèmes de longueurs comparables.
Il est par ailleurs important de signaler que l’énoncé est très directif pour un concours
de ce niveau et comporte de nombreuses questions accessibles et susceptibles d’occu-
per n’importe quel candidat durant quatre heures. La sélection sur une telle épreuve
se fait donc surtout sur l’efficacité et la capacité à comprendre et mener rapidement
les raisonnements demandés par l’énoncé.
Téléchargé gratuitement sur www.Doc-Solus.fr .

c
Éditions H&K Publié dans les Annales des Concours 2/22
Indications
Première partie
1.1.2.a Appliquer le théorème du moment cinétique.
1.1.2.b Montrer que l’aire balayée par la trajectoire entre tet t+ dtest r2dα/2.
1.1.3.d Évaluer la distance rau périgée et à l’apogée.
1.2.1 Le champ de gravitation est −→
g0=−−−→
grad V.
1.2.2.a La force de gravitation est déviée en direction du bourrelet équatorial.
1.2.4.d Exprimer l’accélération centripète en fonction du rayon aet de la période T.
1.2.4.e Donner la direction et le sens de la variation −→
dL du moment −→
Lqui, on le
rappelle, est normal au plan de la trajectoire.
1.3.3.a Que dire de l’angle βau cours de la trajectoire du satellite héliosynchrone ?
Deuxième partie
2.1 Utiliser la notion de plan d’onde pour simplifier la différence de marche entre
les rayons passant par Pet M.
2.2.b Que doit valoir θ′pour que l’écho soit reçu ?
2.3.a Réécrire e(M) sachant que cos θ= [exp(jθ)−exp(−jθ)]/2afin de réutiliser
par analogie le calcul de la question 2.2.a.
2.3.c Dans quelle direction la diffraction se fait-elle ?
Troisième partie
3.1 Projeter la largeur de diffraction en Pselon les directions −→
uxet −→
uy.
3.2 Utiliser −→
SM = −→
SP + −−→
PM.
3.3.a Quel intervalle de temps ∆tsépare les échos venant de Pet Q? À quoi le
comparer ?
3.3.d Avec H = R cos θ, comment évolue δx et δy quand θaugmente ?
3.4 Positionner le point B′du sol conduisant au même intervalle de temps ∆t.
Quatrième partie
4.1 Utiliser −−−→
S2M2=−−−→
S1S2+−−−→
S1M1+−−−−→
M1M2pour calculer S2M2en supprimant
les termes d’ordre 2.
4.3.d Quelle variation d’altitude ∆zmodifie la différence de marche δde λ?
4.4.a Écrire −−−−→
M1M2=δx −→
ux+δy −→
uy+δz −→
uzet supprimer les termes d’ordre 2 dans δ.
Où le paramètre dintervient-il dans δ?
4.4.b Évaluer par projection le déplacement δu entre M1et M2dans la direction
de visée θpuis retrouver ce terme dans la différence de marche δ. En déduire
la variation ∆(δu)qui fait évoluer la différence de marche de λ.
Téléchargé gratuitement sur www.Doc-Solus.fr .

c
Éditions H&K Publié dans les Annales des Concours 3/22
I. Étude de la trajectoire d’un satellite terrestre
1.1.1 L’expression de −→
fmontre que le champ de gravitation −→
g0est à symétrie
sphérique. La répartition de la masse terrestre doit donc être elle aussi à symétrie
sphérique. En effet, si la masse volumique µ(M) au sein de la Terre est indépendante
des angles θet φet ne dépend que du rayon r, alors les plans (M,−→
ur,−→
uθ)et (M,−→
ur,−→
uφ)
sont des plans de symétrie. Le champ de gravitation en M, invariant selon les angles
θet φet appartenant aux plans de symétrie, s’écrit donc
−→
g0(M) = g0(r)−→
ur
Le théorème de Gauss appliqué à la surface fermée sphérique de centre Oet de
rayon r > Renfermant toute la masse MTde la Terre conduit à
ZZ
−→
g0·−→
dS = −4πGMTsoit 4πr2g0(r) = −4πGMT
Il vient −→
g0(M) = −GMT
r2
−→
ur
et avec µ= GMT, la force gravitationnelle −→
f(M) s’écrit bien sous la forme recherchée
−→
f(M) = m−→
g0(M) = −µm
r2
−→
ur
1.1.2.a Le moment en Ode la force gravitationnelle subie par le satellite est
−−→
M0=−−→
OM ∧−→
f(M) = r−→
ur∧−µm
r2
−→
ur=−→
0
Le théorème du moment cinétique appliqué au satellite, par rapport au point O
fixe dans le référentiel géocentrique galiléen (R0), s’écrit donc
−→
dL
dt=−→
M0=−→
0
Le moment cinétique −→
Lest donc constant.
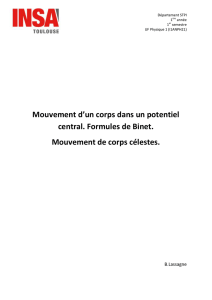
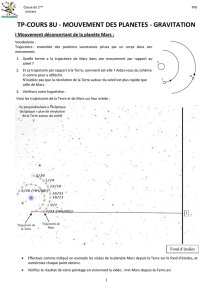
Avec −→
L = −−→
OM ∧m−→
v(M) perpendiculaire aux
vecteurs position et vitesse, ce moment cinétique
est nécessairement orthogonal au plan (P) = OXY
de la trajectoire et porté par la normale OZ.
Au nœud N, le satellite passe du Sud au Nord, ce
qui permet d’orienter la trajectoire et de fixer le
sens du moment cinétique selon les Zcroissants.
Enfin, le centre Ode la Terre correspond à l’un
des foyers de la trajectoire. On en déduit l’allure
ci-contre.
XNO
N′
Nord
Sud
−→
L = L −→
uZ
Y
L’angle iest l’inclinaison de la trajectoire, il est compris entre 0et π.
L’angle ψest appelé ascension droite, elle est comprise entre 0et 2π.
Sur le domaine de définition de i, l’axe OY du trièdre direct est donc bien
toujours orienté dans le sens Sud-Nord.
Téléchargé gratuitement sur www.Doc-Solus.fr .

c
Éditions H&K Publié dans les Annales des Concours 4/22
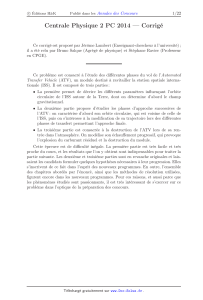
1.1.2.b La constante C = L/m correspond à la
constante des aires.
Entre tet t+ dt, le satellite passe de MàM′.
L’aire dS balayée pendant dtest, à l’ordre 1, la sur-
face du triangle OMM′:
dS = 1
2(r+ dr)rdα=1
2r2dα
En divisant par dt, il vient
dS
dt=1
2r2dα
dt
O
M
M′
dα
r+ dr
r
trajectoire
En utilisant les coordonnées polaires (r, α)dans le plan de la trajectoire, on trouve
−→
v(M) = d
dt(r−→
ur) = dr
dt
−→
ur+rdα
dt
−→
uα
donc −→
L = −−→
OM ∧m−→
v(M) = r−→
ur∧mr dα
dt
−→
uα=mr2dα
dt
−→
uZ
et C = L
m=r2dα
dt
La constante des aires divisée par 2 représente donc l’aire balayée par unité de temps.
C’est la vitesse aréolaire. On peut enfin déduire du calcul précédent que
dt=r2dα
C
1.1.2.c On a montré que −→
Lest orienté selon +−→
uZ.
Par ailleurs,
(−→
uZ= sin i−→
u+ cos i−→
k0
−→
u= sin ψ−→
ı0−cos ψ−→
0
où −→
uest le projeté de −→
uZsur le plan équato-
rial Ox0y0. Il vient donc
−→
L = L hsin isin ψ−→
ı0−sin icos ψ−→
0+ cos i−→
k0ix0
y0
O
−→
u
i
ψ
π
2−ψ
z0
Z
X
1.1.3.a Le vecteur accélération s’exprime en coordonnées polaires par
d−→
v
dt=d2r
dt2−rdα
dt2−→
ur+2dr
dt
dα
dt+rd2α
dt2−→
uα
Or 2dr
dt
dα
dt+rd2α
dt2=1
r
d
dtr2dα
dt=1
r
dC
dt= 0
De plus, dα/dt= C/r2d’après la question 1.1.2.b, on obtient alors en éliminant
dα/dtde la composante selon −→
ur
d−→
v
dt=d2r
dt2−C2
r3−→
ur
La force gravitationnelle subie par Métant portée par −→
ur, le principe fonda-
mental de la dynamique impose à l’accélération du point Mdans le référentiel
galiléen (R0)d’être radiale. C’est ce que l’on vérifie à la question 1.1.3.a.
Téléchargé gratuitement sur www.Doc-Solus.fr .
1
/
4
100%