Champ magnétique tournant

CHAMP MAGNETIQUE TOURNANT
Presser la touche F5 pour faire apparaître les signets
qui favorisent la navigation dans le document.
Sommaire
1 Généralités ............................................................................................................................... 1
2 Expression mathématique d'un champ tournant ...................................................................... 1
2.1 Notion de répartition spatiale sinusoïdale......................................................................... 1
2.2 Expression du champ compte tenu de la rotation du rotor ............................................... 2
2.3 Remarque .......................................................................................................................... 3
3 Création d'un champ tournant .................................................................................................. 3
3.1 Armature fixe alimentée par un courant sinusoïdal monophasé....................................... 3
3.2 Armature fixe alimentée par des courants triphasés ......................................................... 4
3.3 Armature mobile alimentée par un réseau alternatif......................................................... 6
3.4 Armature alimentée par des courants périodiques non sinusoïdaux ................................ 6
4 Action d'un champ tournant sur un bobinage .......................................................................... 6
4.1 Remarque préliminaire......................................................................................................6
4.2 Force électromotrice induite dans une spire diamétrale ................................................... 7
4.3 Force électromotrice induite dans le bobinage ................................................................. 8
4.4 Interaction électromagnétique........................................................................................... 9

CT 1
CHAMP MAGNETIQUE TOURNANT
1 Généralités
Les machines tournantes sont formées habituellement de deux armatures magnétiques
coaxiales séparées par un entrefer:
− le stator, fixe, qui présente une surface interne cylindrique et pour lequel les enroulements
sont placés dans des encoches
− le rotor, mobile, qui peut être soit à pôles lisses, avec une structure analogue à celle du
stator, soit à pôles saillants, les conducteurs étant alors enroulés autour des "cornes
polaires".
En régime de fonctionnement, les courants circulant dans les différents enroulements créent
dans l'entrefer un champ magnétique variable dans le temps et dans l'espace. On dit de ce
champ qu'il est tournant s'il présente les mêmes caractéristiques que celui créé par un bobinage
alimenté en courant continu ( ou par un aimant permanent ) animé d'un mouvement circulaire
autour d'un axe perpendiculaire à la direction d'une paire de pôles.
Dans ce qui suit, on ne s'intéressera qu'aux machines hétéropolaires, qui présentent une
alternance de pôles Nord et Sud en rappelant qu'on appelle pas polaire la distance angulaire qui
sépare deux pôles consécutifs et que ce pas vaut π/p, où p désigne le nombre de paires de pôles
de la machine.
Etant donné que l'on étudiera essentiellement les champs tournants créés par des courants,
on caractérisera ces champs à l'aide du vecteur H
→, directement lié aux courants par le
théorème d'Ampère. Si nécessaire, on utilisera le fait que l'entrefer est un milieu amagnétique
pour déterminer l'induction magnétique à l'aide de la relation BH
→→
=µ
0.
2 Expression mathématique d'un champ tournant
La définition du champ tournant faisant référence à un bobinage mobile parcouru par un
courant constant, nous allons nous placer dans ce cas en considérant le champ créé par un rotor
alimenté en courant continu. Le stator, lui, n'est pas alimenté et ne sert, ici, qu'à refermer les
lignes de champ.
2.1 Notion de répartition spatiale sinusoïdale
Supposons pour le moment que le rotor est immobile. Le courant circulant dans les enrou-
lements crée en tout point de l'entrefer un champ magnétique qui possède en particulier la

CT 2
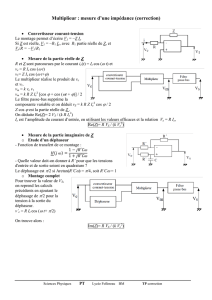
propriété suivante: l'épaisseur de l'entrefer étant faible devant les dimensions de la machine,
les lignes d'induction sont radiales et la valeur h du champ en un point ne dépend que de la
position angulaire θ de ce point par rapport à un axe, choisi arbitrairement, perpendiculaire à
l'axe du rotor ( figure 1 ).
De par la construction du dispositif, l'alternance des 2p pôles
Nord et Sud est parfaitement régulière. Quelle que soit la répartition
des conducteurs, la fonction h(θ) est donc périodique, de période
2π/p. Cependant, pour diverses raisons qui apparaîtront
ultérieurement dans l'étude des machines, le fonctionnement optimal
de celles-ci implique que les harmoniques de h(θ) soient les plus
faibles possibles. Ceci est également réalisé au moment de la
construction ( du moins pour les machines de puissance élevée ),
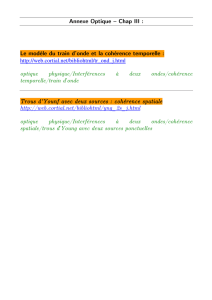
l'idéal correspondant au cas où h(θ) se réduit à son fondamental. S'il
en est ainsi, on dira que le champ est à répartition spatiale
sinusoïdale et on mettra la fonction h(θ) sous la forme
h = HM·cos[ p(θ − θ0) ]
avec θ0, position angulaire d'un pôle Nord pris comme référence et
HM, valeur maximale de h ( ou, ce qui revient au même, valeur du
champ sur l'axe d'un pôle Nord ).
2.2 Expression du champ compte tenu de la rotation du rotor
Le mouvement du rotor peut se traduire en écrivant que la position de l'axe du pôle Nord de
référence évolue avec le temps. Nous ne considérerons ici que le cas du mouvement uniforme.
En posant Ω la vitesse de rotation angulaire, et en choisissant convenablement l'origine des
temps, nous aurons θ0 = Ω·t, d'où
h = HM·cos[ p(θ − Ωt) ].
Cette grandeur étant alors également une fonction sinusoïdale du temps, on dit que le champ
est à répartition spatiale et temporelle sinusoïdale.
Nous avons représenté sur les figures 3 et 4 la répartition du champ dans l'entrefer d'une
machine tétrapolaire à deux instants différents, chaque vecteur ayant pour longueur la valeur
de h au point considéré.
Ultérieurement, par souci de simplification, on caractérisera, si nécessaire, le champ
tournant uniquement par la position spatiale à l'instant considéré du maximum correspondant
au pôle Nord de référence. Il faudra cependant toujours garder à l'esprit qu'il ne s'agit là que
d'une représentation symbolique, le champ magnétique réel existant en tout point de l'entrefer.
axe
θ
h
rotor
entrefer
stator
figure 1
axe
θ0
θ
h pôle
Nord
figure 2

CT 3
figure 3: t = 0 2π
Ω
figure 4: t = 2
ππ
ΩΩ
2
2.3 Remarque
On peut aussi mettre l'équation de h sous la forme h = HM·cos(pθ − pΩt), soit, en posant
ω = pΩ, HM·cos(pθ − ωt). Réciproquement, nous admettrons sans démonstration que, chaque
fois qu'une répartition de champ sera caractérisée par une fonction du type HM·cos(pθ − ωt),
nous serons en présence d'un champ tournant dans le sens trigonométrique direct avec la
vitesse de rotation ω/p.
3 Création d'un champ tournant
L'étude des machines tournantes montre que la conversion électromagnétique d'énergie n'est
possible que s'il y a interaction entre deux champs tournants, l'un créé par le stator, l'autre par
le rotor. Si on peut toujours générer le deuxième en faisant tourner une armature alimentée en
courant continu, ceci n'est évidemment pas possible pour le stator, fixe par définition. Il faudra
donc utiliser d'autres moyens pour créer ce champ. Dans ce qui va suivre, nous allons décrire
quelques-unes des possibilités existantes.
3.1 Armature fixe alimentée par un courant sinusoïdal monophasé
On suppose que la répartition spatiale du champ est sinusoïdale. L'armature étant immobile,
rien ne s'oppose à faire coïncider l'origine des angles avec l'axe de référence pour la répartition
des champs ( qui correspondait à l'axe du pôle Nord dans le cas d'une alimentation en
axe
Pôle Nor
d
de référence
stator
rotor
axe
Pôle Nor
d
de référence
stator
rotor

CT 4
courant continu ). Ceci permet d'écrire h = H·cospθ, où H est ici une fonction du temps,
puisque le champ est créé par un courant variable.
En première approximation, on peut négliger la réluctance de la partie ferromagnétique du
circuit devant celle de l'entrefer. Le champ H le long de l'axe du pôle est donc proportionnel au
courant i circulant dans l'enroulement. Moyennant un choix convenable de l'origine des temps,
et en notant ω sa pulsation, ce dernier a pour expression i = IM·cosωt. Du fait de la proportion-
nalité, le champ H se met donc sous la forme HM·cosωt, avec HM = k·IM, où k est une constante
qui ne dépend que de la géométrie du système. Au total, le champ aura donc pour expression:
h = HM·cosωt·cospθ
Cette expression ne correspond visiblement pas à celle d'un champ tournant ( en particulier,
certains points de l'entrefer voient un champ toujours nul − on parle quelquefois de "champ
pulsant" ). Cependant, en développant h sous la forme
hH pt pt
M
=
−
+
+cos( ) cos( )
θ
ω
θω
2
soit hHpt
Hpt
MM
=−++
22
cos( ) cos( )θω θω
on constate, en utilisant la remarque faite au paragraphe 2.3, que
l'on est en présence de deux champs tournants h1 et h2, de même
amplitude HM/2, l'un tournant à la vitesse ω/p, l'autre à la vitesse
−ω/p ( donc à la même vitesse arithmétique, mais en sens inver-
se ). Ceci constitue le théorème de Leblanc.
3.2 Armature fixe alimentée par des courants triphasés
Le dispositif comporte trois enroulements identiques,
créant chacun une répartition sinusoïdale de champ. Ces
enroulements sont décalés l'un par rapport à l'autre d'un angle
égal à 2π/3p, et alimentés par un système de courants
sinusoïdaux triphasés, que nous supposerons équilibrés pour
le moment. Les origines d'angle et de temps sont choisies
comme pour le courant monophasé en prenant comme
référence supplémentaire l'enroulement alimenté par la phase
1. Si l'ordre des phases est celui représenté sur la figure 6, et
si le réseau d'alimentation est direct, les champs créés par
chaque enroulement auront pour expression
pour la bobine 1:
[
]
hH p H t I t
MM11 1 1
==
=
cos cos cosθω
ω
avec H proportionnel à i
axe
h1
h2
ω
p
−ω
p
figure 5
2π
3p 2π
3p
axe
d
e
la
bobine 2
axe
d
e
la
bobine 3
axe
d
e
la
bobine 1
figure 6
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%