Ch 08 Trigonométrie

Ch 08 Trigonométrie
1/4
Ch 08 Trigonométrie
I – Mesure des angles orientés de vecteurs
I.1 – Rappels
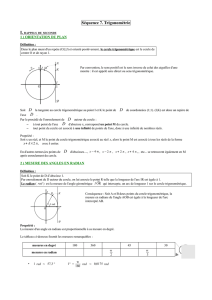
On considère le cercle de centre O et de rayon 1 que l’on
appelle cercle trigonométrique.
Le périmètre de ce cercle est 2π.
On considère la droite graduée ∆ tangente au cercle en I.
Pour un réel x repéré sur la droite ∆, M désigne le point que
l'on obtient sur le cercle par "enroulement" de la droite ∆ sur
le cercle.
On dit que M est l'image sur le cercle du réel x.
Par convention l'enroulement se fait dans le sens inverse des
aiguilles d'une montre appelé sens direct ou trigonométrique.
Si M est le point du cercle associé au réel x, ses coordonnées dans le repère (O, I, J) sont (cos x ; sin x).
Exemple
Sur un cercle trigonométrique,
placer
€
0,
π
2,
π
3, −
π
4,
π
, 3
π
4.
I.2 – Le radian
Définition
Soit M un point d’un cercle trigonométrique. On appelle mesure en radian de l’angle orienté
€
(OI, OM)
tout nombre réel x associé au point M.
Remarques
Un cercle trigonométrique mesure 2π rad ou 360° (angle plein), d’où π rad = 180°.
Si le point M est associé à un réel x alors il est aussi associé à tout réel de la forme
€
x+2k
π
, où k
désigne un entier relatif.

Ch 08 Trigonométrie
2/4
I.3 – Angle orienté de deux vecteurs
Définitions
Le plan est muni d’un repère orthonormé direct (O, I, J).
€
u
et
€
v
sont deux vecteurs non nuls. Sur le cercle trigonométrique, on construit les points F et H tels
que
€
OF
et
€
OH
soient colinéaires et de même sens respectivement à
€
u
et
€
v
.
! La mesure de l’angle orienté
€
(
u ,
v )
est égale à celle de l’angle orienté
€
(OF, OH)
! Si x est le réel associé au point F et y le réel associé au point H alors y – x est une mesure en
radian de l’angle orienté
€
(
u ,
v )
.
! L’unique mesure en radian de l’angle orienté
€
(
u ,
v )
qui appartient à l’intervalle
€
−
π
;
π
] ]
est
appelée mesure principale.
Remarque
Si α est une mesure de l’angle orienté
€
(
u ,
v )
alors les autres mesures de cet angle orienté sont les réels
€
α
+2k
π
, où k désigne un entier relatif.
On note
€
(
u ,
v )
=
€
α
+2k
π
ou
€
(
u ,
v )=
α
(2
π
)
, modulo 2π.
II – Cosinus et sinus
Définition
Le plan est muni d’un repère orthonormé direct (O, I, J). Si x désigne une mesure en radian de l’angle
orienté
€
(
u ,
v )
alors on pose :
cos
€
(
u ,
v )
= cos x et sin
€
(
u ,
v )
= sin x.
Deux angles orientés sont associés s’ils ont des cosinus et des sinus égaux ou opposés.
Propriétés
Pour tout réel x :
€
cos(−x)=cos x
et
€
sin(−x)=−sin x
Dém.

Ch 08 Trigonométrie
3/4
Propriétés
Pour tout réel x :
€
cos(x+
π
)=−cos x
€
sin(x+
π
)=−sin x
Dém.
Propriétés
Pour tout réel x :
€
cos(
π
−x)=−cos x
€
sin(
π
−x)=sin x
Dém.
Propriétés
Pour tout réel x :
€
cos(
π
2+x)=−sin x
€
sin(
π
2+x)=cos x
Dém.
Propriétés
Pour tout réel x :
€
cos(
π
2−x)=sin x
€
sin(
π
2−x)=cos x
Dém

Ch 08 Trigonométrie
4/4
III – Propriétés des angles orientés de vecteurs
III.1 – Angles nul ou plat
Propriété
Pour tout vecteur non nul , on a :
€
(
u ,
u )=0 (2
π
)
et
€
(
u , −
u )=(−
u ,
u )=
π
(2
π
)
.
III.2 – Relation de Chasles
Propriété
Pour tous vecteurs non nuls , et on a :
€
(
u ,
v )+(
v ,
w )=(
u ,
w ) (2
π
)
III.3 – Conséquences
Propriété
Pour tous vecteurs non nuls , on a :
€
(
v ,
u )=−(
u ,
v ) (2
π
)
;
€
(−
u , −
v )=(
u ,
v ) (2
π
)
;
€
(−
u ,
v )=(
u , −
v )=(
u ,
v )+
π
(2
π
)
.
IV – Equations cos x = cos a et sin x = sin a
a est un réel donné.
Propriété
Les solutions de l’équation cos x = cos a sont les réels
€
a+2k
π
et
€
−a+2k
π
, où k désigne un entier relatif.
Propriété
Les solutions de l’équation sin x = sin a sont les réels
€
a+2k
π
et
€
π
−a+2k
π
, où k désigne un entier relatif.
1
/
4
100%