Mod_lisation Actions M_caniques.pps

Lionel GRILLET Lycée B FRANKLIN
Modélisation
des
Actions Mécaniques

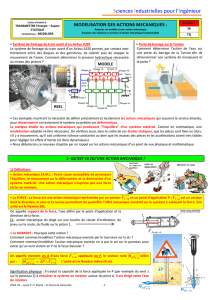
Définition
Action Mécanique = toute cause susceptible de
Modifier le mouvement d’un corps
Maintenir un corps au repos
Déformer un corps
2 familles d’actions mécaniques
Actions de contact
Actions à distance (pesanteur, magnétisme,…)

Notion de force
Principe des actions mutuelles
force = A.M qui s’exerce entre 2 particules.
Une force se caractérise par :
son point d’application
sa direction
sa norme
son sens
Modélisation par un
Vecteur
Unité de mesure de la norme : le NEWTON –symbole N
Principe des Actions Mutuelles
Toute force implique l’existence d’une autre force qui lui
est directement opposée
= principe d’Action/Réaction

Exemples
Action de pesanteur
p,m
P
Action exercée par la terre sur toute particule p possédant une masse
Point d’application : la particule
Direction : droite passant par le centre de la terre et la particule
Sens : vers le centre de la terre
Norme : m.g m : masse de la particule (kg)
g : accélération de pesanteur (ms-2)
Action engendrée par un contact ponctuel
Point d’application : point de contact M
Direction : Normale au contact
Sens : de (1) vers (2)
Norme : en Newton
M
u
(1)
(2)
12
R
Action exercée par le solide 1 sur le solide 2 en contact ponctuel
en M de normale
u
u
21
R
PAM :
21 12
RR

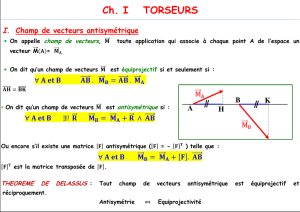
Interprétation Physique
Définition
()
B
MF
Vecteur caractérisé par
direction
sens
Norme
« axe de rotation »
« sens de rotation »
( ) " "
B
M F F bras de levier
d
()
B
M F BA F
Modèle Mathématique
()
B
M F F
()
B
M F AB
( ) sin
B
M F AB F
Vecteur caractérisé par
direction
sens
Norme
Définition
, , ( ) base directe
B
AB F M F
Notion de moment
A
F
B
(S)
d
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%