Ppt

Modélisation
des
Actions Mécaniques
GOP
Cours :

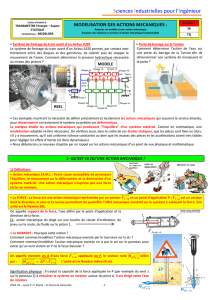
1) NOTION D’ACTION MECANIQUE
Créer ou modifier un mouvement ;
On appelle action mécanique toute cause susceptible de :
Maintenir un corps au repos ;
Déformer un corps ;

2) DIFFERENTS TYPES D’ACTIONS
MECANIQUES
2.1) LES ACTIONS MECANIQUES A DISTANCE
En construction mécanique, elles sont essentiellement de
type magnétique ou de pesanteur.
Dans le cas de contact entre deux solides, les deux solides sont
obligatoirement en liaison mécanique et l’action mécanique exercée
dépend de la nature du contact entre les deux solides. ( ponctuel,
linéique, surfacique plan, etc.…)
Par exemple, une liaison pivot glissant ne peut transmettre les mêmes
efforts qu’une liaison encastrement à cause de ses deux degrés de
liberté.
2.2) LES ACTIONS MECANIQUES DE CONTACT
Elles résultent :
- Soit du contact d’un fluide (gaz ou liquide) sur un solide;
- Soit du contact d’un solide avec un autre solide.

3) LE MODELE DE LA FORCE
Nous avons vu en étudiant les liaisons que le contact entre deux pièces pouvait être soit
ponctuel, linéique ou surfacique. Dans un premier temps, nous allons étudier l'action
mécanique transmissible par un contact ponctuel parfait ( liaison parfaite ).
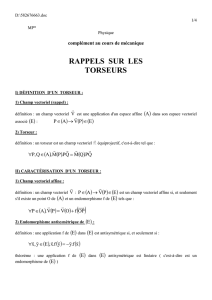
3.1) CAS DU CONTACT PONCTUEL PARFAIT (Sans Frottements)
L'action mécanique qui s'exerce entre deux solides en contact ponctuel sera
modélisée par une force, dont les caractéristiques sont celle d’un vecteur :
- Origine : point de contact E,
- Direction : normale au plan tangent de contact (0,Y ,Z ) donc suivant X.
- Sens : vers la gauche, suivant les X négatifs,
- Norme : dépend, entre autre, du niveau de l’eau dans la cuve.
E4/2On a l'habitude de désigner une action
mécanique modélisable par une force de la
façon qui suit :
solide sollicité
solide qui exerce la force
point d’application de la force
E4/2
X
Y

3.2) CAS DES CONTACTS NON PONCTUELS
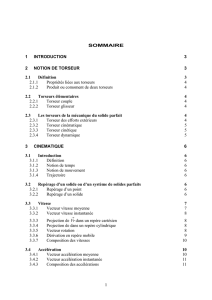
3.2.1) Cas de la Pression d’un Fluide sur une Paroi Plane
f
r
D
f
r
D
f
r
D
f
r
D
C
La pression sera supposée uniforme (constante sur toute la paroi).
Elle s’applique en chaque élément de surface de la paroi.
F
r
Leur somme nous donne une force appelée force de pression , ayant
les caractéristiques suivantes :
f
r
D
Nous avons donc une infinité de forces élémentaires .
-Point d’application :
- Direction :
- Sens :
- Norme :
p.S F
r
, avec :
- F : effort développé (N)
- p : pression uniforme du fluide (Pa)
- S : surface de la paroi plane, en (m2)
F
le centre de la surface, C
perpendiculaire à la surface de contact entre le fluide et la paroi
dirigé vers la paroi
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%