Chapitre VI: Ecoulements linéarisés, les profils

Chapitre VI: Ecoulements lin´earis´es, les profils minces
Nous ´etudions les profils minces en ´ecoulement compressible. La g´eom´etrie est identique `a celle
´etudi´ee en incompressible 1.
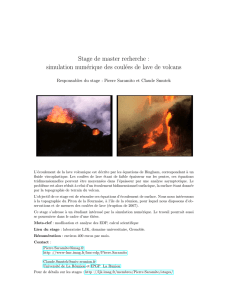
Sur la figure (1), est un petit param`etre mesurant l’´epaisseur du profil. L’extrados (resp.
~
U∞
i=α
A
Ox
y
~n
y=f−(x)
y=f+(x)
F
L
Figure 1: Profil mince en ´ecoulement uniforme amont ~
U∞.
l’intrados) a pour ´equation y+=f+(x) (resp. y−=f−(x)). Le bord d’attaque est en A et le
bord de fuite en F de coordonn´ees (l, 0). On note ~n la normale sortante au profil. Le profil peut ˆetre
inclin´e par rapport `a l’horizontale d’un angle i. L’´ecoulement amont est uniforme de vitesse ~
U∞, de
pression p∞et de masse volumique ρ∞. L’objectif est de d´eterminer pour ce profil, les coefficients
de train´ee et de portance. Lorsque est petit et tend vers 0, le profil tend vers un segment [0, l].
On dit alors que ce profil est mince. Nous allons utiliser cette propri´et´e pour r´esoudre ce probl`eme
de fa¸con approch´ee en le lin´earisant .
1 Equation lin´earis´ee
L’´ecoulement est celui d’un fluide parfait, stationnaire, bidimensionnel, adiabatique de fluide par-
fait. On n´eglige les forces massiques. La vitesse est not´ee U= (u, v). Avec ces hypoth`eses
l’´ecoulement est isentropique (cf chapitre I) et l’on peut ´ecrire les ´equations r´egissant l’´ecoulement
sous la forme:
dρ
dt +ρdivU= 0 (a)
∂U
∂t + rot(U)∧U+ grad U2
2+1
ρgradp= 0 (b)
∂s
∂t +Ugrad(s) = 0 (c)
(1)
On suppose d’autre part que l’´ecoulement amont est stationnaire et uniforme. L’´ecoulement est
homoentropique. La loi d’´etat du fluide est alors p=g(ρ, s0) ce qui caract´erise un ´ecoulement
barotrope. On a (cf calcul chapitre II ´equations (12) et (13)):
gradp=c2gradρ(2)
L’´ecoulement ´etant uniforme `a l’infini, le rotationnel de la vitesse est nul, il est en outre barotrope,
parfait et on n´eglige les forces ext´erieures, on peut appliquer le th´eor`eme de Lagrange. L’´ecoulement
1cf cours MF101
47

est alors irrotationnel au cours du mouvement. On remplace alors l’´equation (1) (c) par rotU= 0:
U
c2grad(p) + ρdivU= 0 (a)
grad U2
2+1
ρgradp= 0 (b)
∂u
∂y −∂v
∂x = 0 (c)
(3)
En multipliant l’´equation (3) (a) par c2
ρet en la soustrayant `a l’´equation (3) (b) multipli´ee par U,
on obtient: ((u2−c2)∂u
∂x +uv ∂u
∂y + (v2−c2)∂v
∂y = 0
∂u
∂y −∂v
∂x = 0 (4)
D’autre part le profil est mince, en premi`ere approximation il est assimilable `a un segment sur
lequel l’´ecoulement resterait identique avec une vitesse partout ´egale `a ~
U∞, une pression p∞, une
masse volumique ρ∞. En pr´esence du profil l’´ecoulement est perturb´e et l’on peut ´ecrire:
u=U∞+u1
v=v1
p=p∞+p1
ρ=ρ∞+ρ1
(5)
La vitesse du son peut ´egalement ˆetre lin´earis´ee, compte tenu de la loi d’´etat rappel´ee avant
l’´equation (2):
c=s∂p
∂ρs
=s∂g
∂ρs
(6)
avec:
g(ρ, s0) = g(ρ∞+ρ1, s0) = g(ρ∞, s0) + ∂g∂ρ (ρ∞, s0) (7)
Ainsi,
c=c∞+O() (8)
La lin´earisation de l’´equation (4) compte tenu de (5) et (8) en se limitant aux termes d’ordre
conduit `a:
(U2
∞−c2
∞)∂u1
∂x −c2
∞∂v1
∂y = 0
∂u1
∂y −∂v1
∂x = 0
(9)
Le fluide ´etant parfait il faut ´ecrire en outre la condition de glissement sur le profil.
u
v!.~n±= 0 avec ~n±= gradF±(x, y) (10)
o`u ~n±est la normale sur l’extrados (indice +) ou sur l’intrados (indice −) et F+(x, y) = y−f +(x),
F−(x, y) = y−f−(x) les ´equations de l’extrados et de l’intrados (cf figure (1)). Compte tenu de
(5), la condition de glissement s’´ecrit en se limitant aux termes dominants:
v1x, y =f±(x)=U∞
df±
dx (11)
En faisant un d´eveloppement de Taylor de v1(x, y =f±(x)) autour de y= 0±, on obtient finale-
ment:
v1x, y = 0±=U∞
df±
dx (12)
Soit M∞le nombre de Mach `a l’infini , le syst`eme `a r´esoudre est le suivant:
(M2
∞−1)∂u1
∂x −∂v1
∂y = 0
sur le profil v1(x, y = 0±) = U∞df±
dx
`a l’infini amont u1→0, v1→0
(13)
48

Il est ´evident que lorsque M∞est proche de 1, le terme M2
∞−1 devient petit et la lin´earisation
n’est plus possible, ce r´egime appel´e r´egime transsonique est plus d´elicat `a traiter et ne sera pas
abord´e dans ce cours, on pourra se r´ef´erer par exemple `a Modern Compressible Flow de Anderson
pour plus de d´etails.
2 Classification selon le nombre de Mach
Avant de r´esoudre le syst`eme lin´earis´e pr´ec´edent nous allons ´etudier le syst`eme (9) en fonction de
la valeur du nombre de Mach en utilisant la m´ethode vu en Annexe du chapitre III. Supposons
connues les vitesses u1et v1, la classification de cette ´equation n´ecessiste la r´esolution de:
M2
∞−1 0 0 −1
0−1 1 0
1 0 λ0
0 1 0 λ
u1, x
v1, x
u1, y
v1, y
=
0
0
du1
dx C
dv1
dx C
(14)
Le d´eterminant associ´e `a la matrice dans (14) vaut:
(1 −M2
∞)λ2+ 1 = 0 (15)
L’application triviale de la m´ethode des caract´eristiques montre que pour un ´ecoulement subsonique
M∞<1, l’´equation (15) n’a pas de racines r´eelles le syst`eme (9) est elliptique (cf Annexe), si
M∞>1 , il existe par contre deux racines r´elles et donc le syst`eme (9) est hyperbolique. On peut
en outre d´eterminer deux courbes caract´eristiques C±d´efinies par: :
dy
dx =λ±(16)
avec λ±les deux racines de (15) dans le cas hyperbolique. Sur chaque caract´eristique il est possible
de mettre en ´evidence des invariants de Riemann qui r´esultent d’une relation de compatibilit´e:
le second membre de (14) doit appartenir `a l’image de l’endomorphisme associ´e `a la matrice du
syst`eme (14), on a alors:
Sur C+du1+λ+dv1= 0 Sur C−du1+λ−dv1= 0 (17)
3 R´esolution
Pour achever la r´esolution nous allons exploiter le caract`ere irrotationnel de l’´ecoulement qui garan-
tit l’existence d’un potentiel des vitesses Φ:
U= gradΦ (18)
En lin´earisant on obtient:
avec Φ = U∞x+φ1(19)
Le syst`eme (13) peut ˆetre r´e´ecrit `a l’aide du potentiel des vitesses:
(M2
∞−1)∂2φ1
∂2x−∂2φ1
∂2y= 0
sur le profil ∂φ1
∂y (x, y = 0±) = U∞df ±
dx
`a l’infini amont φ1→0
(20)
Nous allons d´eterminer dans le cas subsonique et dans le cas supersonique les principales propri´et´es.
Ceci permet dans les diverses applications de calculer les coefficients de pression, de portance et de
49

train´ee que nous rappelons. Le coefficient de pression est donn´e respectivement sur l’extrados et
l’intrados par:
C±
p=p±−p∞
1/2ρ∞U2
∞
(21)
Compte tenu de (5) on a :
C±
p=2p1
1/2ρ∞U2
∞
(22)
L’´equation (3)(b) lin´earis´ee donne:
p1=−ρ∞U∞u1(23)
Ainsi (22) devient:
C±
p=−2u1
U∞
=−2∂φ1
∂x
U∞
(24)
On rappelle ´egalement les d´efinitions des coefficients de portance et de train´ee2:
CP=P
1/2ρ∞U2
∞(l)avec P=Zl
0
(p−
1−p+
1)dx (25)
Cx =Fx
1/2ρ∞U2
∞(l)avec Fx=2Zl
0
(p+
1
df+
dx −p−
1
df−
dx )dx (26)
3.1 Cas subsonique: Affinit´e de Prandtl-Glauert
L’affinit´e de Prandtl Glauert est une transformation ´el´ementaire qui permet de passer du cas
subsonique au cas incompressible. Soit β2= 1 −M2
∞et posons y=Y/β et φ1=φ/β, en reportant
dans l’´equation (20) il vient:
∆φ= 0 avec ∂φ
∂Y x, 0±=U∞
df±
dx (27)
C’est exactement le probl`eme qui avait ´et´e pos´e en incompressible pour l’´ecoulement autour du
mˆeme profil3.
En utilisant les relations de Prandtl-Glauert. Le coefficient de pression (24) devient:
Cp=−2∂φ
∂x
βU∞
=Cp0
p1−M2
∞
et CP=CP0
p1−M2
∞
(28)
avec Cp0et CP0, les valeurs des coefficients de pression et de portance en incompressible. On
constate que pour M∞tendant vers 1, ces coefficients deviennent infinis, il en est de mˆeme du
coefficient de train´ee. Cette ´etude simplifi´ee apporte des ´el´ements de r´eponse aux ph´enom`enes
observ´es par les pilotes lorqu’ils s’approchaient de M= 1. Les coefficients de train´ee augmentaient
tellement que tout se passait comme s’ils avaient un mur `a franchir, le mur du son.
3.2 Le cas supersonique
On notera maintenant:
β2=M2
∞−1 (29)
Comme nous l’avons d´ej`a vu, le syst`eme (9) est hyperbolique et il existe deux familles de car-
act´eristiques d´etermin´ees en (16). Dans le plan (x, y) ces caract´eristiques sont des droites d’´equations:
C+ξ=x−βy, C−η=x+βy, (30)
2cf cours MF101
3Mecanique des fluides incompressibles, cours MF101
50

Il est imm´ediat de constater que pour M∞>1, l’´equation (20) n’est rien d’autre que l’´equation
des ondes classiques de l’acoustique lin´eaire. Les invariants de Riemann (17) conduisent sur la C+
Sur une courbe ξ =x−βy, du1+λ+dv1= 0 (31)
Sur la C+,u1+λ+v1, ne d´epend pas de ξ. De mˆeme,
Sur une courbe η =x+βy, du1+λ−dv1= 0 (32)
Sur la C−,u1+λ−v1, ne d´epend pas de η. On peut alors ´ecrire:
u1=a(ξ) + b(η)v1=−β(a(ξ)−b(η)) (33)
Sur toute droite d´equation ξ=x−βy,a(ξ) se conserve et sur la droite d’´equation η=x+βy,b(η)
se conserve.
Dans les ´ecoulements lin´earis´es, l’information (en provenance des conditions aux limites) se propage
dans le sens de l’´ecoulement sur les deux familles de caract´eristiques.
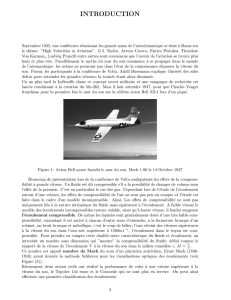
Ces caract´eristiques sont des discontinuit´es faibles de l’´ecoulement (cf chapitre III). Les ondes de
Mach de la d´etente de Prandtl-Meyer correspondent `a des caract´eristiques de l´ecoulement dans
un cas plus g´en´eral non lin´earis´e. Une m´ethode optique sensible aux variations des d´eriv´ees de
la masse volumique, par exemple la strioscopie, permet exp´erimentalement de les visualiser. Elles
sont moins visibles que les chocs car les discontinuit´es y sont plus faibles. Sur le profil de la figure
(2) on peut distinguer une zone claire correspondant `a une d´etente constitu´ee d’un faisceau de
caract´eristiques.
Figure 2: Ondes de d´etente constitu´ee de caract´eristiques et Ondes de choc sur un profil.
51
1
/
5
100%