Variables aléatoires discrètes

11 Variables aléatoires discrètes
« Ce calcul délicat s’étend aux questions les plus importantes de la vie, qui ne
sont en effet, pour la plupart, que des problèmes de probabilité. »
Pierre-Simon, marquis de Laplace (1812)
Plan de cours
I Variables aléatoires discrètes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
A Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
B Loi d’une variable aléatoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
C Fonction de répartition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
D Opérations sur les variables aléatoires (complément) . . . . . . . . . . . . . . . . . . 6
II Moments d’une variable aléatoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
A Espérance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
B Variance et écart-type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
III Lois usuelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
A Loi certaine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
B Loi uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
C Loi de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
D Loi binomiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
E Loi géométrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
F Loi de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
IV Vecteurs aléatoires discrets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
A Couples de variables aléatoires réelles discrètes . . . . . . . . . . . . . . . . . . . . . . 18
B Indépendance et lois conditionnelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
C Espérance, variance et covariance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
D Exemples de sommes de variables aléatoires . . . . . . . . . . . . . . . . . . . . . . . . 25
V Fonctions génératrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
VI Convergence et approximations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
A Approximation d’une loi binomiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
B Loi faible des grands nombres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
VII Lois usuelles – Synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
I – Variables aléatoires discrètes
A – Définition
On lance simultanément deux dés discernables et on choisit comme univers
Ω
=
¹
1
,
6
º2
, que l’on munit de
la probabilité uniforme. Notons alors Xla somme des valeurs des dés et Yle maximum des deux valeurs.
• Quelles sont les valeurs possibles pour Xet pour Y?
Xpeut prendre toutes les valeurs entières entre 2 et 12; Yentre 1 et 6.
• On peut voir Xet Ycomme des fonctions :
X:Ω−→ R
ω7−→ ω1+ω2
et Y:Ω−→ R
ω7−→ max(ω1,ω2)
où ω= (ω1,ω2)
• On peut alors écrire X(Ω) = ¹2, 12ºet Y(Ω) = ¹1, 6º.
Tout comme on note plus généralement f(E)l’image de Epar fpour f:E→F...
–1–

CHAPITRE 11. VARIABLES ALÉATOIRES DISCRÈTES
• Notons Al’événement « la somme des valeurs obtenues vaut 5 ».
On a A={(1,4),(2,3),(3,2),(4,1)}∈P(Ω). Donc :
P(A) = P(X=5) = 4
36 =1
9
Dans l’égalité précédente, on a noté (
X
=5)l’événement
A
. Il convient de voir (
X
=5)comme une
abréviation pratique de X−1({5}) = {ω∈Ω|X(ω) = 5}.
De manière plus générale, (
X
=
i
) =
X−1
(
{i}
) =
{ω∈Ω|X
(
ω
) =
i}
pour
i∈X
(
Ω
)désigne ici un
événement (une partie de Ω) dont on peut calculer la probabilité.
Définition 11.1 : Variable aléatoire discrète
Soit (
Ω,A
)un espace probabilisable. On appelle variable aléatoire réelle discrète toute application
X:Ω→Rtelle que :
•X(Ω)est un ensemble fini ou dénombrable;
• Si x∈X(Ω)alors X−1({x}) = (X=x)est un événement, c’est-à-dire :
∀x∈X(Ω)X−1({x})∈ A
Cette définition appelle plusieurs remarques :
•
Malgré son nom, une variable aléatoire n’est pas une variable (c’est une fonction) et elle n’est pas aléatoire.
•X(Ω)est l’image (directe) de Ωpar X. Si Ωest un univers fini, il en va de même pour X(Ω).
• Si A⊂R,X−1(A)désigne l’image réciproque de Apar X:
X−1(A) = {ω∈Ω|X(ω)∈A}
Notons que la notation X−1(A)ne sous-entend aucunement la bijectivité de X.
•
Comme dans l’exemple précédent, on souhaitera calculer la probabilité de l’événement
X−1
(
A
)encore
noté (
X∈A
). Encore faut-il que cette partie de
Ω
soit bien un événement, c’est-à-dire qu’elle soit contenue
dans la tribu
A
. C’est finalement ce que nous assure la définition mais nous reviendrons sur ce point
plus tard.
Rappel sur les images réciproques :
Exercice 1
Notons f(resp. g) la fonction définie sur R∗
+(resp. R) par f(t) = ln(t)et g(t) = t2.
Déterminer les ensembles suivants :
f−1(R);f−1(R+);f−1(R∗
+);f−1([0,1[) ;g−1([0, a]) ;g−1(] −a,a[) ;g−1(R+)
Dans le cadre de ce chapitre, nous aurons recours aux notations suivantes (pour x∈Ret A⊂R) :
(X∈A) = X−1(A) = {ω∈Ω|X(ω)∈A};
(X=x) = X−1({x}) = {ω∈Ω|X(ω) = x};
(X¶x) = X−1(] − ∞,x]) = {ω∈Ω|X(ω)¶x};
(X<x) = X−1(] − ∞,x[) = {ω∈Ω|X(ω)<x};
(X¾x) = X−1([x,+∞[) = {ω∈Ω|X(ω)¾x};
(X>x) = X−1(]x,+∞[) = {ω∈Ω|X(ω)>x}.
Remarquons que si le premier ensemble constitue un événement, ce sera le cas de tous les autres.
–2–

Mickaël PROST Lycée Chaptal – PT*
Exercice 2
Dans le cadre du lancer de dés précédent, expliciter les événements suivants :
(X>10);(X¾11);(X=4);(X¶1);(Y=3);(Y∈ {1,2})
La définition d’une variable aléatoire impose à (
X
=
x
)pour
x∈X
(
Ω
)quelconque d’être un événement.
Mais c’est également le cas pour (X∈A)avec A⊂X(Ω)quelconque.
Proposition 11.2
Soient (
Ω,A
)un espace probabilisable et
X
une variable aléatoire discrète sur cet espace. Soit
A
un
sous-ensemble quelconque de R. L’ensemble X−1(A), noté (X∈A), est un événement.
Démonstration
Tout d’abord, remarquons que X−1(A) = X−1(A∩X(Ω)) car :
X−1(A) = {ω∈Ω|X(ω)∈A}={ω∈Ω|X(ω)∈A∩X(Ω)}
Donc seule l’intersection de
A
et de
X
(
Ω
)nous intéresse. Or,
A∩X
(
Ω
)est au plus dénombrable donc on
peut le décrire sous la forme :
A∩X(Ω) = {xn|n∈N}
Ainsi, (
X∈A
) =
[
n∈N
X−1
(
{xn}
) =
[
n∈N
(
X
=
xn
).(
X∈A
)est donc la réunion dénombrable d’événements
(par définition d’une variable aléatoire), c’est donc un événement.
On pourra noter que lorsque
Ω
est lui-même dénombrable, c’est automatiquement le cas pour
X
(
Ω
). Dans
ce cas, on munira alors
Ω
de sa tribu naturelle
P
(
Ω
). Toutes les parties de
Ω
seront alors des événements.
Il n’y aura donc pas à « vérifier » que
X
est bien une variable aléatoire : toute application de
Ω
dans
R
sera
une variable aléatoire. Il se peut cependant que
Ω
ne soit pas dénombrable mais, en pratique, on demandra
rarement de prouver que
X
est bien une variable aléatoire. Ce sera souvent l’énoncé d’un problème qui
l’admettra ou bien qui n’abordera même pas la question...
Cette année, toutes les variables aléatoires seront supposées finies ou discrètes. Dans les deux cas de figure,
X
(
Ω
)sera au plus dénombrable ce qui nous autorise désormais à l’écrire sous la forme
X
(
Ω
) =
{xn|n∈N}
.
Théorème 11.3
Soient (Ω,A)un espace probabilisable et Xune variable aléatoire discrète sur cet espace.
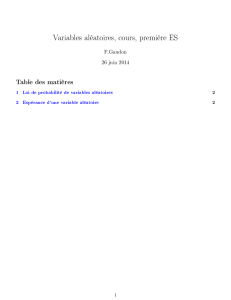
Avec les notations précédentes, la famille ((X=xn))n∈Nest un système complet d’événements.
Démonstration
Justifions le fait que
+∞
G
n=0
(X=xn) = Ω.
•
Montrons que les événements [
X
=
xn
]sont deux à deux incompa-
tibles, en supposant les xndeux à deux distincts.
Soient i,j∈Navec i6=jet ω∈(X=xi)∩(X=xj).
On a alors X(ω) = xi=xj.
Absurde, donc (X=xi)∩(X=xj) = ∅.
•
On a
+∞
[
n=0
(
X
=
xn
)
⊂Ω
. De plus, si
ω∈Ω
alors il existe
i∈N
tel
que
X
(
ω
) =
xi
et on a donc
ω∈
(
X
=
xi
). D’où
Ω⊂
+∞
[
n=0
(
X
=
xn
),
ce qui prouve que
+∞
[
n=0
(X=xn) = Ω.
[X=x0]
[X=x1]
[X=x2]
[X=x3]
· · ·
Ω
((X=xn))n∈Nest un s.c.e.
–3–

CHAPITRE 11. VARIABLES ALÉATOIRES DISCRÈTES
Exercice 3
Décrire le système complet d’événements associé à la variable aléatoire
Y
introduite dans l’exemple
précédent.
B – Loi d’une variable aléatoire
On munit désormais l’espace probabilisable (Ω,A)d’une probabilité P.
Définition 11.4 : Loi d’une variable aléatoire
Soit
X
une variable aléatoire discrète sur un espace probabilisé (
Ω,A,P
). On appelle loi de probabilité
de X(ou plus simplement loi de X) et on note PXl’application :
PX:X(Ω)⊂R→R
x7−→ P(X=x)
Notons qu’une loi de probabilité est une fonction numérique à variable réelle. On peut étendre PXàRcar
si
x/∈X
(
Ω
),(
X
=
x
) =
∅
qui est de probabilité nulle. On peut représenter une loi de probabilité par un
tableau ou par un diagramme en bâtons.
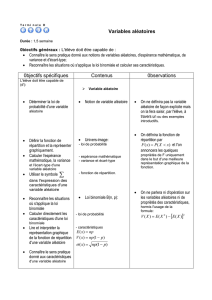
Exemple
Représenter graphiquement la loi de probabilité de la variable aléatoire
X
dans le cas du lancer de dés.
On munira pour cela (Ω,P(Ω)) de la probabilité uniforme.
xi2 3 4 5 6 7 8 9 10 11 12
P(X=xi)1
36 1
18 1
12 1
95
36 1
65
36 1
91
12 1
18 1
36
P(X=x)
x
1/36
2/36
3/36
4/36
5/36
6/36
12345678 9 10 11 12
Faire de même avec la la loi de probabilité de la variable aléatoire Y.
Exercice 4
Une pièce amène pile avec la probabilité
p
et face avec la probabilité 1
−p
, 0
<p<
1. On la lance
n
fois
de suite. Soit Xle nombre de fois où pile apparaît au cours de ces lancers. Chercher la loi de X.
D’après le théorème précédent, X
x∈X(Ω)
P(X=x) =
+∞
X
n=0
P(X=xn) = 1.
Le théorème suivant, dont on admet la preuve, constitue une sorte de réciproque et permet surtout de définir
une variable aléatoire par sa loi de probabilité sans avoir à étudier l’expérience aléatoire sous-jacente.
–4–

Mickaël PROST Lycée Chaptal – PT*
Théorème 11.5
Soient
{xn|n∈N}
un ensemble infini dénombrable, les
xn
étant deux à deux distincts, et (
pn
)
n∈N
une
famille de réels positifs telle que
+∞
X
n=0
pn
=1. Alors il existe une variable aléatoire discrète
X
sur un
espace probabilisé (Ω,A,P)à valeurs dans {xn|n∈N}telle que : ∀n∈NP(X=xn) = pn
Exemple
À quelle condition sur αles réels pn=α·λn
n!(n¾0)sont-ils les coefficients d’une loi de probabilité?
Comme
+∞
X
n=0
λn
n!=eλ, on en conclut que
+∞
X
n=0
pn=1 si et seulement si α=e−λ. On a bien alors pn¾0.
Deux variables aléatoires
X
et
Y
ont même loi si
X
(
Ω
) =
Y
(
Ω
)et si pour tout
x∈X
(
Ω
),
P
(
X
=
x
) =
P
(
Y
=
x
).
Attention, cela ne signifie pas que X=Y, c’est-à-dire que X(ω) = Y(ω)pour tout ω∈Ω.
Exercice 5
On considère une pièce équilibrée que l’on lance 4 fois. On note
X
le nombre de piles obtenus et
Y
le
nombre de faces obtenues. Xet Yont la même loi mais ne sont pas identiques.
C – Fonction de répartition
Définition 11.6 : Fonction de répartition
Soit
X
une variable aléatoire discrète sur un espace probabilisé (
Ω,A,P
). On appelle fonction de
répartition de Xet on note FXl’application :
FX:R→R
x7→ P(X¶x)
On notera que la fonction de répartition est définie sur Ret pas seulement sur X(Ω).
Exercice 6
Déterminer la fonction de répartition dans le cas où X(Ω) = {0, 1}et P(X=0) = P(X=1).
Proposition 11.7 : Propriétés de la fonction de répartition
Soit Xune variable aléatoire réelle sur un espace probabilisé (Ω,A,P).
(i) L’application FXest croissante.
(ii) lim
x→−∞ FX(x) = 0 et lim
x→+∞FX(x) = 1.
Démonstration
(i) Soient x,y∈Rtels que x<y.
Comme (X¶x)⊂(X¶y), par croissance de P,FX(x) = P(X¶x)¶P(X¶y) = FX(y).
(ii)
L’application
FX
étant croissante et majorée, elle admet une limite en +
∞
. Il suffit alors de calculer
lim
n→+∞P
(
X¶n
)en utilisant le théorème de la continuité croissante appliqué à la suite croissante
d’événements ((X¶n))n∈N:
lim
n→+∞FX(n) = lim
n→+∞P(X¶n) = P+∞
[
n=0
(X¶n)=P(Ω) = 1
On procède de même pour montrer que lim
x→−∞ FX(x) = 0.
–5–
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
1
/
31
100%