SIMULATION DES SYSTEMES LINEAIRES CONTINUS ET

Ch.VI – Simulation des systèmes - p1
SIMULATION DES SYSTEMES
LINEAIRES CONTINUS ET INVARIANTS
I – Réponse indicielle d'un système linaire continu invariant
1. Gain statique d'un système
1.1. Définition : pour un système linéaire continu invariant stable, sollicité par une entrée
constante d'amplitude A, on note que le signal de sortie s(∞), limite de s(t) pour t → ∞, est constant,
et on définit le gain statique K, par :
A) (s
) (e ) (s
K
∞
=
∞
∞
=
1.1. Détermination du gain statique
Soit H(p) la fonction de transfert du système. On se place
dans les conditions d'Heaviside.
p
A
)p(E A)t(e
L
=→=
H(p)
E(p)
Y(p)
Alors :
p
A
)p(H)p(S =
,
Puis avec le théorème de la valeur finale,
))p(H A(lim))p(pS(lim)(s
0p0p →→
==∞
Enfin :
H(0)H(p))(lim
A
H(p)) A(lim
) (e ) (s
K
0p
0p
===
∞
∞
=
→
→
Remarques : si H(p) a un pôle en 0, alors il s'agit d'un système intégrateur, la sortie obtenue pour
une entrée constante est donc une rampe, est s(∞) = ∞ ... le système n'est pas stable.
Conclusion : Nous verrons que l'augmentation du gain statique, peut améliorer certaines
performances du système (la précision), mais qu'à l'inverse il peut générer d'autres problèmes, le
dépassement, l'instabilité par exemple.
II – Réponse indicielle d'un système du premier ordre
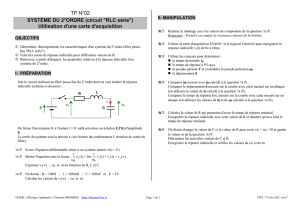
1. Exemple du circuit RC
Reprenons le circuit RC étudié chapitres III et V.
# On a déterminé la fonction de transfert :
RCp 1 1
)p(E )p(U
)p(H +
==
On trouve bien H(0) = 1 = K gain statique du circuit.
# On impose au système un échelon de tension e(t) = 1, pour t > 0. On cherche alors
l'expression temporelle de la sortie u(t), et ses caractéristiques.

Ch.VI – Simulation des systèmes - p2
R
C
e(t) u(t)
I
J L
K M
N
i(t)
H(p)
E(p)
U(p)
p
1
)p(E =
et
)RCp 1.(p 1
)]p(H[ )p(E)p(U
+
==
Puis en décomposant cette fraction,
RC
1
p
1
-
p
1
)p(U +
=
Et enfin par transformation inverse,
RC
t
e 1)t(u
−
−=
On peut alors tracer la courbe de réponse indicielle du circuit RC,
u(t)
voir cas général ci-
après.
2. Cas général, premier ordre simple
K, gain statique : K = H(0)
τ constante de temps du système.
p 1 K
)p(H
τ
+
=
E
(p)
S
(p)
# Soit la réponse à un échelon d'amplitude A :
)p 1(p AK
p
A
p 1 K
)p(S
τ+
=×
τ+
=
# Etudions les limites en zéro et en l'infini :
s(0) = Lim
t→0
(s(t)) = Lim
t→∞
(p S (p)) = 0 valeur initiale nulle
s(∞) = Lim
t→∞
(s(t)) = Lim
t→0
(p S (p)) = AK valeur finale AK
# Etudions la fonction dérivée et ses limites en zéro et en l'infini :
)p 1( AK
)p 1(p AK
p)0(s)p(PS)p('S τ+
=
τ+
×=+−=
valeur initiale nulle
τ
===
+∞→→
AK
))p('pS(lim))t('s(lim)0('s
p0t
pente initiale non nulle
0))p('pS(lim))t('s(lim)('s
0pt
===+∞
→+∞→
asymptote horizontale à l'infini
# Analyse temporelle, après décomposition en éléments simples et transformation inverse :
]e1[ AK)t(s
t
τ
−
−=

Ch.VI – Simulation des systèmes - p3
Points particuliers : t = τ, s(τ) = 0,63 AK ; t = 3τ, s(3τ) = 0,95 AK
Conclusion :
On observe sur cette courbe temporelle :
La tangente à t = 0 coupe l'asymptote à l'infini pour t = τ.
D'autre part à t = τ on atteint soit 63% de la valeur finale.
Enfin on atteint 95% de la valeur finale pour t = 3τ. Ainsi Tr
5%
= 3τ.
Dans le paragraphe sur l'identification, et dans différentes applications, on verra qu'à partir d'une
réponse à un échelon expérimentale, on peut retrouver les caractéristiques du système (tr
5%
, τ...)
en utilisant les propriétés observées sur la courbe de réponse.
Remarques : pour un premier ordre généralisé, l'équation est
]
dt )t(de
' )t(e [ K
dt )t(ds
)t(s τ+=τ+
.
On note alors la présence d'un zéro dans la fonction de transfert, et pour la réponse indicielle une
discontinuité de la position en t = 0
+
. Mais les caractéristiques générales de la réponse indicielle
d'un premier ordre sont conservées (il faut néanmoins procéder à un décalage d'origine en
ordonnée pour retrouver ces caractéristiques).

Ch.VI – Simulation des systèmes - p4
III - Réponse indicielle - Système du second ordre
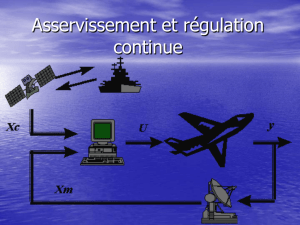
1. Exemple : système mécanique
On reprend le système [masse – ressort – amortisseur] étudié dans le chapitre III.
Solide M de masse m, ressort de raideur k, amortisseur de coefficient de frottement visqueux f.
)p(X
)k fp mp( k
)p(Y )t(kx)t(ky
dt )t(dy
f
dt )t(yd
m
2
L
2
2
++
=→=++
2
p
k
m
p
k
f
1
1
X(p)
Y(p)
H(p) ++
==
Entrée échelon d'amplitude A :
)p
k
m
p
k
f
1(p
A
Y(p)
2
++
=
My(t)
x(t)
X
Y
k
f
Y
0
X
0
2. Cas général, deuxième ordre simple
2.1. Expression symbolique de la réponse indicielle
L'équation différentielle d'un système du 2
nd
ordre s'écrit :
)t(Ke
dt )t(sd
a
dt )t(ds
a )t(s
2
2
21
=++
Fonction de transfert s'écrit :
2
00
p
p
2 1
K
)p(H
++
=
ωω
ξ
En pratique, à partir de la fonction de transfert obtenue après modélisation, on identifie les
différents coefficients afin de déterminer les caractéristiques K, ξ et ω
0
.
La réponse indicielle d'amplitude A dans les conditions d'Heaviside est en symbolique :
++
=
2
00
p
p
2 1p
K A
)p(S
ωω
ξ
Pour obtenir l'expression temporelle de la sortie, on décompose S(p) en éléments simples. Pour
cela une discussion suivant les différentes valeurs de ξ est nécessaire, en effet les racines de la
fonction de transfert dépendent de la valeur de ξ.

Ch.VI – Simulation des systèmes - p5
2.2. Cas ξ > 1, régime apériodique
# Expression des pôles de la fonction de transfert
Le dénominateur de H(p) possède deux racines réelles, le système a donc deux pôles réels
distincts P
1
et P
2
:
)1( P
2
001
−+−=
ξωωξ
et
)1( P
2
002
−−−=
ξωωξ
Ainsi
( )( )
p 1p 1p KA
)p(S 21 τ+τ+
=
avec
1
1P
1
−=τ
et
2
2P
1
−=τ
# Etudions les limites en zéro et en l'infini :
s(0) = Lim
t→0
(s(t)) = Lim
t→∞
(p S (p)) = 0 valeur initiale nulle
s(∞) = Lim
t→∞
(s(t)) = Lim
t→0
(p S (p)) = AK valeur finale AK
# Etudions la fonction dérivée et ses limites en zéro et en l'infini :
)p 1)(p 1( AK
)p 1)(p 1(p AK
p)0(s)p(PS)p('S
2121
τ+τ+
=
τ+τ+
×=+−=
valeur initiale nulle
0))p('pS(lim))t('s(lim)0('s
p0t
===
+∞→→
pente initiale nulle
0))p('pS(lim))t('s(lim)('s
0pt
===+∞
→+∞→
asymptote horizontale à l'infini
# Analyse temporelle, après décomposition en éléments simples et transformation inverse :
Décomposition en éléments simples
( )( )
τ+τ
−
τ+
τ
τ−τ
+=
τ+τ+
=p1p1
1
p
1
K A
p 1p 1p KA
)p(S
2
2
2
1
2
1
1221
Expression temporelle de la réponse indicielle
τ−τ
τ−τ
+=
τ
−
τ
−
21
t
2
t
1
12
e e
K A
K A)t(s
Conclusion : la réponse obtenue est apériodique, son allure assez proche de celle de la réponse
d'un système du premier ordre, diffère néanmoins par la tangente horizontale en zéro.
Principales caractéristiques :
- En t = 0 la pente est nulle, tangente horizontale ;
- Pas de dépassement ;
- Valeur finale A K, asymptote horizontale.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%