C3A_1

Asservissement et régulation
continue

Chapitre1 Notions essentielles
Ce qu’il faut savoir dans ce chapitre
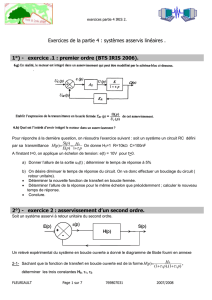
1.1) Terminologies
1.2) Structure d'un système asservi
1.2.1) Commande en boucle ouverte
1.2.2) Commande en boucle fermée
1.2.3) Structure générale
1.3) Exemples d’application
1.4) Concepts généraux à l'étude des systèmes asservis
1.5) Rappel sur les Transformées de Laplace
1.6) Fonction de transfert
1.6.1) Deux formes de fonction de transfert
1.6.2) Calcul de la sortie du système
1.6.3) Fonction de Transfert des Éléments Interconnectés

1.1) Terminologies (1)
Automatisme: dispositif technologique qui
remplace l'opérateur humain dans la conduite
d'une machine, d'un processus, d'une installation
industrielle
Automatique: L’ensemble de science et de
technique qui étudie les automatismes

1.1) Terminologies (2)
Processus à commander: (ou système)
l'ensemble de l'installation à piloter. Ceci est
caractérisé par des signaux d'entrée et de sortie
et les lois mathématiques (modèle) reliant ces
signaux

1.1) Terminologies (3)
Signal :
Grandeur physique générée par un appareil ou
traduite par un capteur (température, débit, vitesse,
position etc.)
On distingue :
Signal d’entrée : indépendant du système, il se
décompose en commandable (consigne) et non
commandable (perturbations)
Signal de sortie : dépendant du système et du
signal d’entrée. On distingue sortie mesurable et
non mesurable
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
1
/
28
100%