DS 5 année 2015-2016 - Lycée Henri Poincaré PCSI 1 année 2016

DS Physique n°5 PCSI 2015 – 2016
Conseils :
• Ce devoir comporte 3 problèmes.
• Le correcteur tiendra compte de la présentation (soin apporté aux schémas) et de la ré-
daction de votre copie : justifiez rapidement vos affirmations, donnez la valeur littérale
simplifiée des résultats en fonction des données de l’énoncé, vérifiez l’homogénéité et la
cohérence (tout résultat non homogène sera sanctionné).
Les résultats non encadrés ne seront pas notés. Laissez une marge à gauche pour le correc-
teur.
• Rédigez les problèmes sur des copies différentes.
•Numérotez vos copies doubles : 1/4, 2/4 .... (si 4 copies). N’oubliez pas de mettre votre
Nom sur chacune des copies.
• L’usage des calculatrices est autorisé.
Lycée Poincaré – Nancy Page 1/8 24 février 2016, durée 3h

DS Physique n°5 PCSI 2015 – 2016
I. MANÈGE
Dans le référentiel terrestre R, on définit un
repère Oxyz avec un axe (Oz)vertical ascen-
dant. La figure ci-contre est une vue dessus.
Un manège est constitué de deux plateformes
circulaires horizontales de même rayon R:
l’une est immobile par rapport au référentiel
terrestre, sa circonférence passe par l’origine
Odu repère et son centre est sur l’axe (0x);
l’autre peut rouler sans glisser autour de la
première.
Un enfant, assimilé à un point M, a pris place sur le manège, en un point de la circonférence
de la plateforme mobile. Mdécrit alors une trajectoire contenue dans le plan horizontal (Oxy)et
décrite par l’équation polaire :
r= 2R(1 + cos θ)
et on suppose de plus que la vitesse angulaire omega est maintenue constante, soit
θ=ωt
à partir de l’instant initial t= 0.
1. Trajectoire :
Reproduire sur un schéma les axes du plan et le cercle représentant la plateforme fixe. Placer
sur ce schéma les quatre points de la trajectoire de Mcorrespondant aux angles θ= 0 (ce
point sera noté A), θ=π
2(point B), θ=π(point C), θ= 3π
2(point D), puis dessiner l’allure
de la trajectoire complète (cette courbe s’appelle une cardioïde).Q1
Ajouter la base cylindrique (vecteurs ~er, ~eθ, ~ez)au point D.
2. Vitesse :
(a) Déterminer, en fonction du temps tet des deux constantes Ret ω, les composantes duQ2
vecteur vitesse ~v(M)dans Rdans la base cylindrique. Dessiner ce vecteur au point D.
(b) Calculer la norme de la vitesse.Q3
(c) En quel point l’enfant risque-t-il le plus d’être éjecté du manège (vitesse maximale), etQ4
dans quelle direction serait-il alors éjecté ?
(d) En quel point l’enfant pourra-t-il essayer de descendre du manège (vitesse nulle) ?Q5
3. Accélération :
(a) Déterminer les composantes du vecteur accélération ~a(M)dans Rdans la base cylin-Q6
drique. Dessiner ce vecteur au point D.
(b) Calculer la norme de l’accélération.Q7
(c) Il n’existe pas de sensation absolue de vitesse, en revanche ce qu’on ressent fortement
est l’accélération que l’on subit. En quel point l’enfant risque-t-il le plus de se sentir malQ8
(accélération maximale) ?
Lycée Poincaré – Nancy Page 2/8 24 février 2016, durée 3h

DS Physique n°5 PCSI 2015 – 2016
II. SUSPENSION DE VOITURE
Dans ce problème, nous allons étudier un modèle de suspension de voiture. La suspension est
constituée d’un amortisseur visqueux et d’un ressort, reliés à une roue sans masse et l’ensemble
supporte une masse mreprésentant la voiture. Le coefficient d’amortissement est noté ηet la
raideur du ressort k. L’accélération de pesanteur est notée g.
On ramènera le véhicule à un point matériel M(système d’étude), posé sur la suspension.
La longueur à vide du ressort est notée l0. Les altitudes de la roue (notée y) et de la masse (notée
Y) sont prises « aux bornes du ressort » et de l’amortisseur (voir figure ci-dessous). À l’équilibre
la longueur du ressort est leq et on redéfini les origines de yet Ytelles que yeq = 0 et Yeq = 0 à
l’équilibre sur une route horizontale. On a donc l=leq +Y−y.
On se placera dans un référentiel en translation rectiligne uniforme horizontalement par rap-
port au sol à une vitesse égale à celle de la voiture. Ce référentiel est galiléen puisqu’en translation
rectiligne uniforme par rapport au référentiel terrestre. Dans ce référentiel, la vitesse du châssis
est uniquement selon la direction verticale dY
dt~ey=˙
Y ~ey.
La force exercée par l’amortisseur est proportionnelle à la vitesse du châssis par rapport à la
roue, soit : −η˙
l~ey, avec ˙
l=dl
dtla dérivée temporelle de la variable lpar rapport au temps.
x
MM
Y
y
kη~g
~ex
~ey
1. Faire le bilan des forces appliquées au point matériel M.Q9
2. Exprimer leq en fonction de l0,k,m, et g, à l’équilibre sur une route horizontale.Q10
3. Calculer la résultante des forces qui s’exercent sur la masse en fonction de let ˙
l.Q11
4. Établir l’équation différentielle qui régit le mouvement vertical de la masse Met montrerQ12
que cette équation peut se mettre sous la forme :
¨
Y+1
τ˙
Y+ω2
0Y=f(y, ˙y)
où τet ω0sont des constantes et fune fonction que l’on explicitera.
5. La voiture roule sur une route horizontale. À l’instant t= 0, la roue monte sur une marche
de hauteur ∆. La figure ci-dessous présente l’évolution de Y(t).
Indiquer, en justifiant, pour chaque courbe si elle correspond ou non à une solution pos-Q13
sible.
Lycée Poincaré – Nancy Page 3/8 24 février 2016, durée 3h

DS Physique n°5 PCSI 2015 – 2016
t
Y
∆
(a)
t
Y
∆
(b)
t
Y
∆
(c)
6. On s’intéresse maintenant au régime d’oscillations forcées en imposant à la roue un mou-
vement sinusoïdal. Dans ce régime oscillant, on utilisera les notations complexes : y=aejωt
et Y=Aejωt.
Montrer que l’équation différentielle établie précédemment peut alors s’écrire :Q14
Y=H(ω)y
où H(ω)est une fonction de transfert que l’on explicitera.
7. En introduisant une variable u=ω
ω0et un facteur sans dimension r(que l’on explicitera),
montrer que l’on peut alors écrire :Q15
H(u) = 1
1−u2
1+jru
.
8. Calculer les valeurs limites de |H(u)|et de arg(H(u)) quand u→0et u→ ∞.Q16
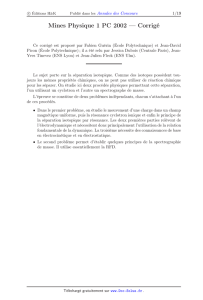
9. La suspension constitue un filtre mécanique. La figure ci-dessous montre l’allure de la
courbe |H(u)|pour différentes valeurs de r(r= 1/2,1et 3).
Identifier les courbes correspondant aux différentes valeurs de ret commenter ces courbes.
En déduire la nature du filtre.Q17
u
|H(u)|
1 2 3 4 5
(a)
(b)
(c)
10. La voiture roule maintenant sur une route ayant un profil d’équation y=acos(2πx/λ). On
suppose que la roue reste en permanence en contact avec la route et que sa vitesse vselon
l’axe horizontale (Ox)reste constante.
Exprimer la pulsation d’excitation ωen fonction de vet λ.Q18
11. Dans le film Le salaire de la peur, réalisé par H.-G. Clouzot en 1953, un camion transportant
de la nitroglycérine doit passer sur un pont fait de tôle ondulée. Pour limiter l’amplitude
des oscillations (de Y), le camion doit-il rouler lentement ou à vive allure (justifier votreQ19
réponse à l’aide de l’allure de |H(u)|) ?
Lycée Poincaré – Nancy Page 4/8 24 février 2016, durée 3h

DS Physique n°5 PCSI 2015 – 2016
12. En fait, la grandeur pertinente pour mesurer l’intensité des secousses n’est pas l’amplitude
du mouvement du camion, mais l’amplitude de l’accélération verticale Aacc qu’il subit.
Justifier que l’on peut écrire :Q20
Aacc(ω) = aω2|H(ω)|.
13. Calculer les valeurs limites de Aacc(ω)lorsque ω→0et ω→ ∞.
À l’aide de la courbe |H(u)|donnée précédemment, tracer l’allure de Aacc(ω)pour r= 1.Q21
14. Ce résultat vous ferait-il changer d’avis au sujet de la vitesse à adopter pour éviter les se-Q22
cousses trop importantes du camion de nitroglycérine ?
15. Le filtre mécanique réalisé par la suspension possède un équivalent électrique. Sur le circuit
schématisé sur la figure ci-dessous, les dipôles notés 1, 2 et 3 possèdent des impédances
notées Z1,Z2et Z3.
Z1Z2
Z3
UeUs
En régime sinusoïdal, exprimer la fonction de transfert H=Us
Ueen fonction de Z1,Z2et Z3.Q23
On supposera aussi que le filtre est en sortie ouverte.
16. On souhaite réaliser le circuit électrique correspondant à la suspension. Pour cela, on dis-
pose d’un conducteur ohmique de résistance R, d’un condensateur de capacité Cet d’une
bobine d’inductance L.
Expliquer (en justifiant votre choix) comment disposer ces trois composants, c’est-à-direQ24
trouver qui de 1, 2 et 3 correspond à chaque composant.
17. Exprimer les relations que doivent vérifier R, L et Cen fonction des grandeurs mécaniquesQ25
m,ket ηpour que les deux systèmes soient équivalents.
Lycée Poincaré – Nancy Page 5/8 24 février 2016, durée 3h
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%