Le cours №6 Les bases physiques de la navigation inertielle

Le cours №6
Les bases physiques de la
navigation inertielle
Classification des méthodes de
navigation
Pratiquement il est impossible de mesurer
directement les coordonnées de l'objet. Pour cela,
pour résoudre ce problème on utilise différentes
méthodes de navigation.
L'essentiel de la méthode de navigation
consiste en ce que les coordonnées
i
x
de l'objet ne
sont pas définies directement, mais à l’aide des
capteurs de l'information primaire de quelques
valeurs physiques
njyj...1
, qui sont liés aux
coordonnées
i
x
– par des relations fonctionnelles
connues.
Les fonctionnels
txfy ijj ,
font la base
mathématique de la méthode de la navigation.
Selon le moyen de la définition des
coordonnées de l'objet les méthodes de navigation se
divisent en 3 groupes :
1) les méthodes de calcul de route ;
2) les méthodes de positionnement;

3) les méthodes comparatives- visuelles.
Les méthodes de calcul de route sont basées
sur la mesure du vecteur de l'accélération ou la
vitesse du mouvement de l'objet et l'intégration de ces
valeurs pour avoir les coordonnées de l'objet en
temps réel.
Les méthodes de positionnement sont basées
sur la mesure des valeurs physiques donnant les
lignes ou les surfaces de la position. La position de
l'objet est définie par le point d'intersection de ces
lignes ou ces surfaces (radio navigation, systèmes
satellitaires, les altimètres).
Les méthodes comparatives-visuelles sont
basées sur la définition de la position de l'objet par la
voie de la comparaison du terrain entourant sa
localisation avec son image dans la carte ou dans les
systèmes de la mémoire. Se rapportent ici en
particulier les méthodes de corrélation-extrêmes, qui
sont utilisées pour l’orientation des missiles de
croisière.
À son tour chacun de ces 3 méthodes de
navigation se divise en sous méthode pour divers
signes de classification.
Le système de navigation inertielle (INS) utilise
la méthode de calcul de route. Sur cette méthode sont
fondés aussi les systèmes de navigation d’aérométrie
et Doppler, qui sont basés sur la mesure de la vitesse
du mouvement de l'objet et la définition des

coordonnées de l'objet par l'intégration de cette
vitesse.
Les systèmes de navigation inertielle (INS) sont
basés sur la mesure de l'accélération du mouvement
de l'objet à l'aide des accéléromètres, ensuite ceux-ci
sont intégrés deux fois et on définit les coordonnées
de l'objet. INS en revanche de tout autres systèmes de
navigation sont autonome (ne dépendent pas des
informations extérieures : la pluie, la grêle, Les
obstacles spéciaux). Cependant l'autonomie de l’INS
est non l'absolue. Pour que par l'intégration de
l'accélération on reçoit les coordonnées de l'objet il
est nécessaire de définir les conditions initiales (la
vitesse initiale (d'habitude nulle) et les coordonnées
initiales).
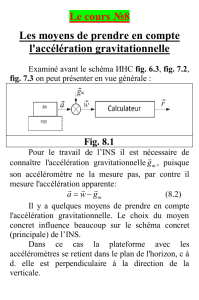
Les accéléromètres mesurent l'accélération non
absolue du mouvement de l'objet, mais l'accélération
apparente (à la projection sur son axe de sensibilité).
m
gwa
(6.1)
On peut mesurer le vecteur de l'accélération
apparente
a
avec un accéléromètre de trois axes
(spatial), ou avec trois accéléromètres d’un seul axe
chacun, disposés orthogonalement.

Fig. 6.1
La triade uniaxiale des accéléromètres forme
trièdre de base
Oxyz
, sur ces axes on définit les
projections de l'accélération apparente (6.1):
z
y
x
mzz
myy
mxx
gwa
gwa
gwa
(6.2)
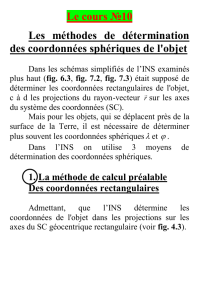
Principes de calcul des coordonnées d'un
objet.
Système des coordonnées inertiel

Fig. 6.2
Supposant, qu’il faut définir les coordonnées
d’un objet par rapport au système des coordonnées
immobile (inertiel). Les coordonnées du centre de
gravité de l'objet p.
M
par rapport au système de
coordonnées de base
O
sont définis par le rayon-
vecteur
r
ou les coordonnées rectangulaires
;
car
O
ne tourne pas, l'accélération absolue
du mouvement de l'objet dans ce système de
coordonnées s’inscrit :
2
2
dt
rd
w
.
(6.3)
Pour la mesure de cette accélération on peut
utiliser le bloc des accéléromètres, qui mesurent le
vecteur de l'accélération apparente
a
.
 6
7
8
6
7
8
1
/
8
100%