Méthodes de détermination des coordonnées sphériques INS

Le cours №10
Les méthodes de détermination
des coordonnées sphériques de l'objet
Dans les schémas simplifiés de l’INS examinés
plus haut (fig. 6.3, fig. 7.2, fig. 7.3) était supposé de
déterminer les coordonnées rectangulaires de l'objet,
c à d les projections du rayon-vecteur
r
sur les axes
du système des coordonnées (SC).
Mais pour les objets, qui se déplacent près de la
surface de la Terre, il est nécessaire de déterminer
plus souvent les coordonnées sphériques
et
.
Dans l’INS on utilise 3 moyens de
détermination des coordonnées sphériques.
1. La méthode de calcul préalable
Des coordonnées rectangulaires
Admettant, que l’INS détermine les
coordonnées de l'objet dans les projections sur les
axes du SC géocentrique rectangulaire (voir fig. 4.3).

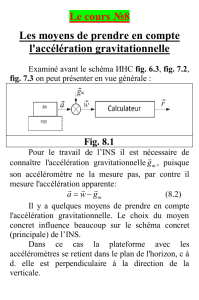
Fig. 10.1
u
– La vitesse de la rotation de la Terre.
h
arctg
;
22 h
arctg
; (10.1)
222
hr
;
tu
.
(10.1)

En cas de nécessité la latitude géographique
défini selon (2.12) :
2sin
. (10.2)
(10.2)
D'habitude on stabilise la plateforme avec les
accéléromètres dans le SC inertiel
иии
O
1
. Dans ce
cas il n'y a pas de nécessité de commander les
gyroscopes, et l'expression de l'accélération de l'objet
est plus facile dans le SC inertiel
иии
O
. Dans ce
cas on détermine les coordonnées à la projection sur
les axes du SC inertiel, mais le passage vers les
coordonnées
, qui sont nécessaires pour la
solution de l'équation (10.1), conformément à la fig.
10.1:
;
;cossin
;sincos
и
ии
ии
Où
tu
Ce type d’INS s'appelle INS analytique.
2. Le moyen de calcul des
coordonnées sphériques direct
Dans ce moyen PGS avec les accéléromètres est
stabilisé selon les axes géographiques du trièdre
d’accompagnement (fig. 4.4). La plateforme est

stabilisée dans le plan de l'horizon selon la direction
vers le Nord.
Selon (4.2) la projection de la vitesse angulaire
absolue de la rotation du trièdre d’accompagnement
géographique sur ses axes :
x
;
cos
u
y
;
sin
u
z
(10.3)
(10.3)
Pour que PGS se tourne à telles vitesses
angulaires, sur le capteur des moments des
gyroscopes on reçoit les tensions correspondantes, en
obligeant les gyroscopes a preccesser aux vitesses
angulaires (10.3), et la plateforme se tourne avec les
gyroscopes.
Ainsi, selon la tension (le courant) du capteur
de moment on peut mesurer les vitesses angulaires
actuelles
x
y
z
, et alors la latitude et la longitude
sont déterminées de (10.3) :
t
t
y
t
t
x
dtu
dt
0
0
.
cos
;
0
0
(10.4)
(10.4)
Ce type d’INS s'appelle semi-analytique.

3. Le moyen de la mesure directe des
coordonnées sphériques
Par ce moyen on stabilise la plateforme
parallèlement au plan de l'équateur, les
accéléromètres s'installent non pas sur la plateforme
PGS, mais sur une surface séparée à cardans, qui a
deux degrés de liberté relativement à la PGS. La
surface avec les accéléromètres se stabilise selon les
axes du trièdre d’accompagnement géographique.
1
O
– SC Géocentrique;
Oxyz
– Trièdre d’accompagnement
géographique.
Fig. 10.2
 6
7
6
7
1
/
7
100%




![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)