Cours C7-1 3e année ENSTA Notes de cours

Master Modélisation et Simulation (M2)
Cours C7-1 3e année ENSTA
Notes de cours sur les équations de Maxwell
Patrick Ciarlet
Laboratoire POEMS
ENSTA ParisTech
32, boulevard Victor
75739 Paris Cedex 15
version 4.0 (2 septembre 2013)
c
Patrick Ciarlet 2013


Table des matières
1 Champs électromagnétiques et équations de Maxwell . . . . . . . . . . . . . 5
1.1 Equations de Maxwell sous forme intégrale . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Reformulation équivalente des équations de Maxwell . . . . . . . . . . . . . . . . 7
1.3 Relations constitutives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Formulation des équations de Maxwell à l’aide de potentiels . . . . . . . . . 14
1.4.1 Jauge de Lorentz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.4.2 Jauge de Coulomb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5 Milieux conducteurs et isolants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2 Mesure des champs .............................................. 19
2.1 Solvabilité des équations de Maxwell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1.1 A l’origine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1.2 Classification rapide des équations de Maxwell. . . . . . . . . . . . . . . . 21
2.1.3 Plus mathématiquement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.1.4 Unicité des champs électromagnétiques . . . . . . . . . . . . . . . . . . . . . . 24
2.1.5 Résolution des problèmes du second ordre . . . . . . . . . . . . . . . . . . . 26
2.1.6 Passage du second ordre au premier ordre en temps . . . . . . . . . . . 27
2.2 Considérations énergétiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2.1 Un peu de physique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.2 Encore un peu de calculs... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3 Equations stationnaires .......................................... 35
3.1 Equations de Maxwell harmoniques en temps . . . . . . . . . . . . . . . . . . . . . . 35
3.2 Equations harmoniques dans R3.................................. 39
3.2.1 Ondes planes électromagnétiques . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2.2 Propriétés des ondes planes électromagnétiques . . . . . . . . . . . . . . . 40
3.2.3 Décomposition en ondes planes électromagnétiques . . . . . . . . . . . . 41
3.2.4 Ondes planes électromagnétiques dans un conducteur et
épaisseur de peau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44

4c
Patrick Ciarlet 2013
3.3 Phénomènes de résonance vs. phénomènes harmoniques en temps en
domaine borné . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Modèles approchés ............................................... 51
4.1 Modèles statiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.1.1 Electrostatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.1.2 Magnétostatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.1.3 Reformulations des problèmes statiques . . . . . . . . . . . . . . . . . . . . . . 53
4.2 Une hiérarchie de modèles approchés. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.3 Modèles quasistatiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.4 Modèle de Darwin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5 Conditions aux limites ........................................... 61
5.1 Conditions d’interface et conditions aux limites . . . . . . . . . . . . . . . . . . . . 61
5.2 Domaine non borné et conditions aux limites . . . . . . . . . . . . . . . . . . . . . . 63
5.2.1 Conditions aux limites absorbantes. . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.2.2 Précision d’une condition aux limites absorbantes . . . . . . . . . . . . . 67
5.2.3 Couches dissipatives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.3 Conservation de l’énergie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.3.1 Condition aux limites de conducteur parfait . . . . . . . . . . . . . . . . . . 70
5.3.2 Condition aux limites de Silver-Müller . . . . . . . . . . . . . . . . . . . . . . . 71
5.3.3 Condition aux limites d’impédance . . . . . . . . . . . . . . . . . . . . . . . . . . 72
A Compléments mathematiques .................................... 75
A.1 Quelques opérateurs différentiels usuels . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
A.2 Equations aux dérivées partielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
A.3 Définitions et résultats mathématiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
A.3.1 Espaces de Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
A.3.2 Résultats fondamentaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
A.3.3 Problèmes de type Helmholtz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
A.3.4 Problèmes aux valeurs propres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
A.3.5 Problèmes hyperboliques du second ordre . . . . . . . . . . . . . . . . . . . . 86
Références ........................................................... 91
Index ................................................................ 95

1
Champs électromagnétiques et équations de Maxwell
Nous présentons les champs électromagnétiques, en tant que solution des équa-
tions de Maxwell. Les diverses composantes des champs électriques et magnétiques
sont reliées à des termes sources par l’intermédiaire d’un ensemble d’équations écrites
sous forme intégrale, ou sous la forme d’équations aux dérivées partielles du premier
ordre. Puis, nous étudions les relations constitutives, qui fournissent des relations sup-
plémentaires entre champs électromagnétiques. Nous proposons également une autre
formulation, appelée formulation potentielle, avec un nombre d’inconnues réduit, qui
peuvent être interprétées comme des primitives des champs électromagnétiques, en un
certain sens. Pour finir, nous concluons par une brève étude des milieux conducteur
ou isolant.
1.1 Equations de Maxwell sous forme intégrale
La propagation des champs électromagnétiques dans les milieux continus peut
être formulée à l’aide de quatre fonctionnelles, dépendant des variables spatiales et
temporelle. Dans la suite, on note respectivement (x, t)ces variables spatiales et
temporelle, parcourant R3×R, avec x= (x1, x2, x3). Les quatre fonctionnelles à
valeurs dans R3, dites vectorielles, décrivant les champs sont :
1. le champ électrique E,
2. l’induction magnétique B,
3. le champ magnétique H,
4. le déplacement électrique D.
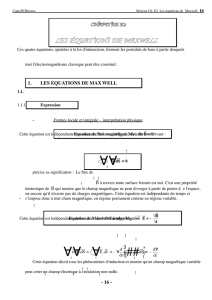
Ces fonctionnelles vectorielles sont reliées entre elles par les équations de Maxwell
(intégrales) écrites ci-dessous. Ces quatre équations sont respectivement nommées loi
d’Ampère,loi de Faraday,loi de Gauss, et absence de monopoles magnétiques libres.
En système d’unité SI, elles s’écrivent “classiquement” :
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
1
/
97
100%