équat.Maxw. - Le Repaire des Sciences

1
ELECTROMAGNETISME
INTRODUCTION
Très souvent, on finit par étudier le mouvement parce que c'est ce que l'on observe quand un
système évolue.
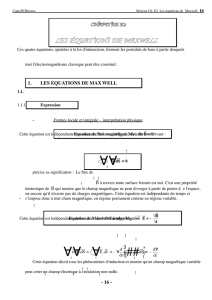
L'étude de la mécanique est divisée en quatre grandes parties, chacune correspondant à un
domaine différent de grandeur des vitesses et des distances.
O
1)
classique 2)
relativiste
3)
quantique 4)
théorie quantique
des champs
distances
vitesses
c
inaccessible
c/10
1) plus grandes distances et plus petites vitesses :
c'est notre monde quotidien. C'est le domaine de la physique classique de Newton. On
pourrait dire que le rayon de l'atome de carbone nous sert d'unité de longueur, par
exemple.
2) plus grandes distances et plus grandes vitesses :
lorsque la vitesse atteint environ 10% de la vitesse de la lumière, il faut faire appel à la
physique relativiste d'Einstein.
3) plus petites distances et plus petites vitesses :
lorsque les distances deviennent inférieures aux dimensions atomiques (environ 10-10
cm), alors les systèmes doivent être décrits par la physique quantique de Schrödinger,
Heisenberg, Bohr etc...On ne peut plus alors parler que de probabilité de présence et
position et impulsion sont reliées par la relation d'incertitude d'Heisenberg.
4) plus petites distances et plus grandes vitesses :
il faut alors tenir compte des aspects quantiques à cause de petites distances et
relativistes à cause des grandes vitesses et utiliser la théorie quantique des champs.
L'électromagnétisme.
C'est le domaine de la physique qui étudie comme un tout les aspects électriques,
magnétiques et optiques d'un milieu, il entre dans la région (2). Cette unification des
trois aspects a été réalisée à la fin du siècle dernier par Maxwell. Einstein espérait
inclure la gravitation dans la famille, il n'y a pas réussi mais il a montré le caractère
relativiste du champ électromagnétique. Par contre, les interactions faibles, sous le
nom d'électro-faibles, y sont entrées, grâce à Weinberg, Salam et Glashow, ce qui leur
a valu le prix Nobel de Physique en 1979.

2
Formulation de l'électromagnétisme (ou électrodynamique) en terme de champs
On a vu les années précédentes que l'espace autour d'une charge électrique en mouvement
(source) est rempli par les champs électrique et magnétique : cela signifie qu'une autre charge,
libre de se déplacer, objet de test appartenant à la même famille (un objet ayant une masse
mais pas de charge serait sans interaction avec la source) et passant dans le voisinage de la
charge précédente subira une force qui modifiera son mouvement d'origine. On verra que
lorsqu'une charge subit une accélération, une partie des champs électrique et magnétique se
propage à la vitesse de la lumière, emportant de l'énergie et de l'impulsion.
Ces observations expérimentales poussent à s'intéresser non pas directement aux charges qui
produisent et subissent des actions électromagnétiques, mais plutôt au champ
électromagnétique lui-même, comme à une grandeur dynamique en soi.
C'est l'objet de ce cours que d'étudier les propriétés de la matière au voisinage de charges en
mouvement, par l'intermédiaire du champ électrodynamique, sans plus faire appel aux
charges. On commencera par se placer dans le vide, puis on s'intéressera aux milieux
matériels réels. Dans tous les cas, les dimensions seront assez grandes pour que l'on n'ait pas
besoin de considérer les aspects quantiques.
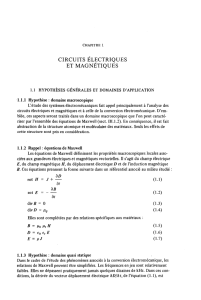
Si la distribution de charges, de densité , est
statique, elle crée un champ électrostatique
seulement.
Si elle est animée d'une vitesse uniforme
v
, elle crée un champ magnétique en plus du
champ électrique. Le champ électrique et le
champ magnétique contiennent une énergie,
qui est donc potentielle.
Si elle est animée d'une vitesse variable
v ,
et d'une accélération
a , alors le champ
électromagnétique se déplace à la vitesse de
la lumière c et rayonne : il y a transport
d'énergie et d'impulsion.
E
E
B
BE
v
v, a

3
ELECTROMAGNÉTISME DU VIDE : DE LA STATIQUE À LA DYNAMIQUE.
L'essentiel du contenu de ce chapitre a été vu en DEUG 2° année. Son objectif est surtout
d'uniformiser les notations et le vocabulaire et de s'assurer que les concepts ont une
signification physique et représentent plus que des termes dans une formule.
A- RAPPELS : opérateurs vectoriels
On se place, pour ces rappels, dans la situation où les sources de charge et de courant sont
stationnaires, ce sont des grandeurs qui ne varient pas dans le temps, elles traduisent la
conservation de la charge totale dans le temps :
(r
)lim
Q
(r
);
t
r
fixe 0
j
j
(r
); j
t
r
fixe
0; j
(r
) (r
). v
où la limite est atteinte quand le volume est assez petit pour que d'une part le résultat ne
change pas quand ce volume est encore diminué, d'autre part la forme choisie pour le volume
n'influe pas de façon mesurable sur la valeur de la densité.
1) les équations locales sont des équations différentielles
Toute la théorie de l'électromagnétisme classique est contenue dans les quatre
équations de Maxwell, associées à l'équation de conservation de la quantité totale de
charge. Comme la plupart des équations de la physique, ce sont des équations
différentielles, c'est-à-dire qu'elles contiennent l'information non pas directement sur
la grandeur physique qui est la fonction inconnue de l'espace dans sa globalité (ce
serait par exemple la masse), mais sur son évolution au voisinage d'un point (ce serait
dans cet exemple la masse volumique). Ceci pour l'aspect physique. De ce fait, le
prix à payer pour accéder à la connaissance de la grandeur physique est que l'on doit
connaître ou imposer des contraintes, autant que de degrés de liberté du problème, ce
qui se traduit du point de vue de la résolution mathématique par le nombre de
constantes qui permettent de définir une solution unique. Ces contraintes sont en
général des conditions aux limites de l'espace étudié ou des conditions de continuité.
2) différence entre fonction scalaire et fonction vectorielle
Alors que pour une fonction scalaire, même fonction d'un vecteur, f(
r ), une seule
équation différentielle de l'espace à trois dimensions, accompagnée de contraintes en
nombre convenable :
grad f(
r )=
U (
r ) accompagné de contraintes
suffit pour obtenir la solution
f(
r ) =
D
U (
r ) .
dr
pour une fonction vectorielle
v (
r ) , il faut connaître les deux opérateurs
vectoriels à la fois, à savoir la divergence et le rotationnel :

4
div
v (
r ) = g(
r ) et
rot
v (
r ) =
V (
r )
accompagné de contraintes.
Ces équations sont dites équations locales parce qu'elles font appel à une
connaissance localement très précise de la façon dont varie le champ vectoriel
v
autour de tout point de l'espace, si l'on veut connaître la valeur du champ en ce point.
Cependant, cette dénomination peut être trompeuse : par exemple, le champ
électrique coulombien créé en un point P par une distribution de charges en volume
est calculé à partir du champ d
E créé par chaque élément du volume chargé,
assimilé à une charge ponctuelle, et du principe de superposition. Il s'agit dans ce cas
de faire la somme des contributions de tout le volume qui crée le champ en un point
P choisi de l'espace. Par contre les équations locales conduisent à la connaissance du
champ en ce point P à partir de la connaissance de sa variation autour de ce même
point P. Pour cette raison, en anglais on appelle les équations locales "differential
laws", par opposition "integral laws".
Il faudra toujours distinguer dans le cas général les points de l'espace qui créent le
champ et ceux autour desquels on le mesure.
3) Rotationnel et théorème de Stokes
3-a le rotationnel
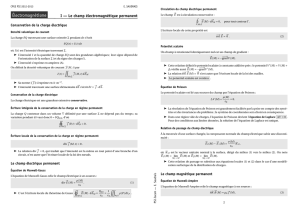
Un point P de l'espace dans lequel existe le champ de
vecteurs
v est repéré par le vecteur
r à partir
d'une origine arbitraire O. C est un contour fermé
autour de ce point, orienté par un sens de parcours et
sur ce contour s'appuie une surface quelconque
(simple, non connexe pour simplifier) d'aire S. Le
périmètre du contour est choisi assez petit pour
considérer la surface comme plane. Celle-ci peut alors
être représentée par un vecteur
S =S.
n , normal
à la surface, orienté dans le sens positif correspondant au sens de parcours sur le contour. On
peut alors évaluer la circulation du vecteur
v sur le contour par unité de surface limitée par
le contour :
circ.1
S(Cf)v
Cf
.dl
La notation S(Cf) signifie : aire de la surface délimitée par le contour fermé Cf remplissant
les conditions précédentes.
Le résultat dépend en général du choix du contour. Si C1 est le résultat obtenu pour un
premier contour et C2 le résultat obtenu pour un deuxième contour enserrant une surface d'aire
plus faible, on peut écrire : C1=C2 + reste. Si la valeur absolue du reste diminue quand la
surface diminue, il peut exister une limite, quand le contour est assez petit pour que ni sa
forme ni la longueur de son périmètre ne compte. Compte tenu du fait que ce contour est
orienté dans l'espace, on définit le rotationnel à partir de cette limite par :
lim
S
1
S(Cf)
v
Cf
.dl
rot
v
(r
). n
O
Mv
dl n
C
r
S
P

5
Pour une aire S limitée par un contour Cf donné, ce produit scalaire est maximal quand les
deux vecteurs sont parallèles : ainsi, la direction et le sens du vecteur
rot
v sont ceux de la
normale à la surface qui conduit à la circulation maximale. Sa norme est la valeur du quotient
lim
S
1
S
v
C
.dl
pour cette surface particulière.
En multipliant la relation par S et en se plaçant à la limite où le rotationnel est sorti de la
limite puisque sa valeur ne change plus :
lim
Cv
C
.dl
rot
v
(r
).lim
Ss
qui s'écrit symboliquement :
rot
v
(r
).ds
v
dCf
.dl
en prenant bien la circulation sur un
contour fermé.
Cette définition est indépendante du choix
du référentiel. En choisissant le vecteur
surface
ds parallèle successivement aux
trois directions d'un repère, on obtient les
composantes du rotationnel dans ce repère
(voir TD).
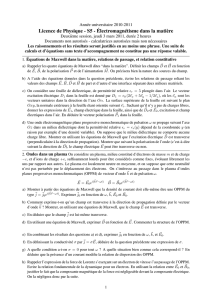
Le rotationnel d'un vecteur mesure l'aptitude du champ de ce vecteur à s'enrouler autour d'un
point donné.
Par exemple, le champ de vecteur ci-contre possède un rotationnel de forte intensité porté par
le vecteur
n .
3-b théorème de Stokes
Il s'appuie sur la définition du rotationnel pour une généralisation à un contour quelconque.
Pour un contour fermé quelconque Cf de longueur et de forme arbitaires, on utilise la méthode
habituelle pour évaluer une grandeur globale : on découpe Cf en éléments de dimension assez
petite pour le représenter :
Cflim
Ci
Ci
1
Ni
où Ni>>1 pour que chacun des Ci puisse être considéré comme plan.
De plus, à partir de ces éléments Ci du contour, on constitue des circuits fermés élémentaires
n
v
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%