Angles orientés et trigonométrie

1
AB
I. Une nouvelle unité de mesure des angles : Le radian (rad)
1. Pourquoi une nouvelle unité d’angle ?
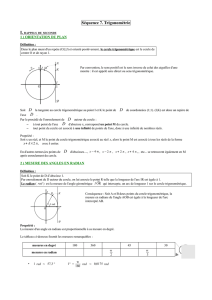
Problème de la mesure des arcs de cercle
il est clair que la longueur de l’arc dépend à la fois du rayon r du
cercle et de l’angle au centre
.
Pour un cercle de rayon r donné , il y a proportionnalité entre la longueur de l’arc
et la mesure de l’angle au centre .
D’où la relation =
avec en degré
Dans cette relation la quantité
ne dépend que de l’angle au centre (
n’est qu’un coefficient numérique
de proportionnalité) On choisit donc de nommer cette quantité ( lire « thêta » , t minuscule en grec) et de
dire que c’est la mesure de l’angle au centre mesuré en radian (rad)
On a donc la nouvelle relation :
= avec en radian
Par le même raisonnement , pour l’aire du secteur circulaire , on obtient :
avec en radian
Dans la suite , on prendra le cas encore plus simple où le rayon du cercle devient l’unité de mesure des
longueurs , on aura donc r = 1 et donc une relation directe entre l’angle au centre en radian et l’arc :
= avec en radian
2. Valeurs usuelles à connaître :
Il y a ,bien sur , proportionnalité entre la mesure en degré et la mesure en radian d’un angle ,
est le
coefficient de proportionnalité permettant de passer du premier au second .
On a donc naturellement le tableau suivant (à compléter ):
fabrication d’un rapporteur gradué en radian
Correspondances à
savoir par cœur
Une valeur approchée au degré prés de 1 radian est :
1 rad = …………°
Angle
( en degré)
Arc
(unité du rayon)
360
Angle
( en degré)
Angle
( en radian)
360
2
180
90
60
30
45
120
150
135
1
Angles orientés et trigonométrie
AB
AB
AB

2
II. Angle orienté de vecteurs
1. Orientation du plan
On définit une orientation du plan ( on parle alors de plan orienté ) :
Le sens positif ou sens trigonométrique direct est le sens inverse des aiguilles d’une montre .
Le sens négatif ou sens anti-trigonométrique est donc celui des aiguilles d’une montre .
2. Cercle trigonométrique :
C’est le cercle de rayon 1 dans le plan orienté
Le repère (O ; ; ) est alors un repère orthonormé direct car l’angle orienté
entre les vecteurs et est de +
3. angle orienté de 2 vecteurs :
a. Une idée de l’angle orienté de 2 vecteurs
Etant donnés 2 vecteurs non-nuls
et ,on définit les points A et B tels
que
=
et
= puis les points A’ et B’ intersections des
demi-droites [OA) et [OB) avec le cercle trigonométrique .
Une mesure de l’angle orienté entre les vecteurs
et est donnée par la
mesure de l’angle orienté
Dans la pratique on confond l’angle et sa mesure et on les note de la même
manière
L’angle orienté entre les vecteurs
et est noté
mais ,par
commodité , on le note traditionnellement (
; )
Par rotation de la figure on peut amener le point A sur l’axe des abscisses et donc le point A’ en I , le
point B’ se retrouve en M et une mesure de (
; ) s’obtient donc sur le cercle trigonométrique .
En fait , cela revient à poser un rapporteur sur l’angle
pour le mesurer .
b. Mesures de l’angle orienté de 2 vecteurs
Sur le cercle trigo placer les points définis dans le tableau ci dessous :
(calculs au verso SVP)
Points P
( ;
)
A
B
C
D
E
F
G
H
K
L
+

3
propriété
Il existe donc une infinité de mesure d’un angle orienté de 2 vecteurs , elles ne diffèrent entre elles que d’un
nombre entier de tours complets , dans un sens ou dans l’autre .
Mathématiquement : si est une mesure de (
; ) alors pour en est une autre
On note : (
; ) = ( )
ou (
; ) [2 ( se lit « (
; ) congru à modulo » )
Mesure principale
Parmi toutes les mesures d’un angle orienté , il n’en existe qu’une seule dans ], on l’appelle mesure
principale de l’angle orienté .
La mesure principale de ( ;
) correspond au « déplacement minimum » pour aller du
point I au point M ( dans le sens direct ou indirect ).
La valeur absolue de cette mesure principale donne la longueur de l’arc géométrique
Ainsi que la mesure de l’angle géométrique
Si la mesure principale de ( ;
) est alors
et =
Exercice
Donner les mesures principales des angles suivants :
4. Propriétés des angles orientés de vecteurs .
a. Angle orienté de 2 vecteurs non-nuls colinéaires :
Si
et sont deux vecteurs non-nuls , colinéaires et de même sens , alors : (
; ) = 0
Si
et sont deux vecteurs non-nuls , colinéaires et de sens opposés , alors : (
; ) =
Les réciproques sont également vraies .
De manière générale , on a donc :
et sont deux vecteurs non-nuls , colinéaires si et seulement si (
; ) =
IM
IM

4
b. Relation de Chasles
Si une mesure de (
;) est et si une mesure de ( ;
) est
alors une mesure de (
;
) est +
On note souvent (
;) + ( ;
) = (
;
)
Conséquences
Dans notre figure du début
(
;) = (
;
) = ( ;
) ( ;
)
et sont deux vecteurs non-nuls , tels que une mesure de (
;) soit .
on a
Une mesure de (
;
) est on note (
;
) = (
;
)
Une mesure de (
;
) est + on note (
;
) = (
;
) +
Une mesure de (
;
) est + on note (
;
) = (
;
) +
Une mesure de (
;
) est on note (
;
) = (
;
)
Attention !
Dans les résultats précédents si est une mesure principale et + n’en sont plus !!
Démonstrations ( avec Chasles )

5
III. Trigonométrie
1. Définitions
Etant donné un point M sur le cercle trigonométrique tel que une mesure de
( ;
) soit On appelle respectivement cos() et sin() les abscisse et
ordonnée du point M dans le repère orthonormé direct (O ; ; ) .
Donc si M(x ;y) on a
et
dans la base orthonormée directe ( ; ) .
C’est-à-dire
+
2. Valeurs usuelles des lignes trigonométriques à connaître
Compléter le tableau suivant après avoir placer les angles sur le
cercle trigo:
3. Premières propriétés
a. Encadrement
IR et
b. Propriété du rayon
cos²() + = …..
c. Périodicité = et =
On dit que les fonctions cos et sin sont des fonctions périodiques de période 2
d. Symétrie par rapport à l’axe des abscisses
= …………
et = ………….
e. Symétrie par rapport à l’axe des ordonnées
= …………
et = ………….
0
1
0
0
1
 6
7
6
7
1
/
7
100%