Cours-r´esum´e
2`eme BAC PC/SVT
Prof: QALLOUQ ABDELLAH
#Qallouq Maths
G´eom´etrie dans l’espace
L’espace est rapporte `a un rep`ere orthonorm´e direct (O,~
i,~
j,~
k)
Notation des coordonn´ees d’un vecteur
~u =x
~
i+y~
j+z~
k⇐⇒ ~u(x, y, z)⇐⇒ ~u
x
y
z
Norme, Distance et Milieu
Soient le vecteur ~u(x, y, z) et les points
A(xA, yA, zA) , B(xB, yB, zB) et I milieu du
segment [AB] alors:
•k~uk=px2+y2+z2
•−→
AB
xB−xA
yB−yA
zB−zA
•AB =||−→
AB||
=q(xB−xA)2+ (yB−yA)2+ (zB−zA)2
•IxA+xB
2,yA+yB
2,zA+zB
2
Expression analytique du produit scalaire
Soient les vecteurs ~u(x, y, z) et ~v(x, y, z)
On a: ~u ·~v =xx0+yy0+zz0
D´efinition
Orthogonalit´e de deux vecteurs
Si ~u et ~v sont deux vecteurs non nuls alors:
~u ⊥~v ⇔~u ·~v = 0
Propri´et´e
droite dans l’espace
Soit A un point de l’espace et ~u un vecteur
non nul.
L’ensemble des points M de l’espace tels
que −−→
AM =k~u ou k ∈R, est la droite
passant par A et de vecteur directeur ~u ,
cette droite est not´ee D(A;~u) .
Propri´et´e
l’ensemble des points tel que −−→
AM ·~u =k
Soit A un point de l’espace et ~u(a, b, c) un
vecteur non nul et k un nombre r´eel
L’ensemble des points M de l’espace tel
que −−→
AM ·~u =kest un plan ayant une
´equation de la forme : ax+by +cz +d= 0
avec d∈R
D´efinition
Plan d´etermin´e par: point et vecteur normal
Tout vecteur ~n de support perpendiculaire
`a un plan (P) est appel´e vecteur normal
`a (P)
(P) = P(A, ~n) = {M∈(P)/−−→
AM·~n = 0}
Si (P) est plan d’´equation cart´esienne
ax +by +cz +d= 0 Alors ~n
a
b
c
est un
vecteur normal `a (P)
D´efinition
Distance d’un point `a un plan
Soit (P) un plan et Ω un point de l’espace
La distance du point Ω au plan (P),
not´ee d(Ω,(P)) est la distance AH ou H
est le projet´e orthogonal de A sur (P) :
d(Ω,(P)) = AH
D´efinition
La distance du point Ω (xΩ, yΩ0zΩ)Rau
plan (P) d’´equation: ax +by +cz +d= 0
est :d(Ω,(P)) = |axΩ+byΩ+czΩ+d|
√a2+b2+c2
Propri´et´e
1

Cours-r´esum´e
2`eme BAC PC/SVT
Prof: QALLOUQ ABDELLAH
Repr´esentation param´etrique d’une droite
Soit (xA;yA;zA) un point de l’espace et
~u(a;b;c) un vecteur non nul
Le syst`eme
x=xA+at
y=yA+bt
z=zA+ct
; (t∈R)
est appel´e repr´esentation param´etrique de
la droite D(A;~u) passant par A et de
vecteur directeur ~u
D´efinition
´
Equation cart´esienne d’une sph`ere S(Ω, R)
On consid`ere (S) = S(Ω, R) tels que
Ω(a, b, c) et R > 0 et soit M (x, y, z) un
point de l’espace.
M∈(s) ⇔ΩM = R
⇔(x−a)2+ (y−b)2+ (z−c)2=R2(E)
(E) est appel´ee ´equation sous forme
canonique de (S) et on a:
(E) ⇔x2+y2+z2−2ax−2by−2cz+d= 0
(E’) Avec d=a2+b2+c2−R2
(E’) est appel´e ´equation cart´esienne de la
sph`ere (S).
D´efinition
Forme canonique:
x2±ax =x±a
22
−a
22
Remarque
#Qallouq Maths
´
Equation cart´esienne d’une sph`ere S([AB])
On note S([AB]) la sph`ere dont l’un des diam`etres est [AB].
Soient A,Bdeux points distincts de l’espace et M(x, y, z) un point de l’espace.
S([AB]) = {M∈(E)/−−→
MA ·−−→
MB = 0}
M∈S([AB]) ⇔−−→
MA ·−−→
MB = 0
⇔(x−xA) (x−xB)+(y−yA)(y−yB)+(z−zA)(z−zB) = 0 (E)
(E) est une ´equation cart´esienne de S([AB])
D´efinition
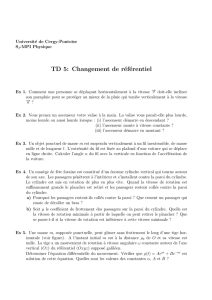
Intersection d’une sph`ere et d’un plan:
Pour d´eterminer l’intersection d’une sph`ere (S) = S(Ω, R) et un plan (P) on calcule d = d(Ω,(P))
Trois cas se pr´esentent:
1er cas: Si d>Ralors (S)∩(P) = ∅
2´eme cas: si d=Ralors (S)∩(P) = {H}O`u Hest l’intersection du plan (P) et la droite (∆)
passant par Ω et de vecteur directeur ~n (~n est un vecteur normal `a (P))
3´eme cas: Si d<Ralors (S)∩(P) = C(H, r) O`u Hest le point d´efini dans le 2´eme cas et rle rayon
du cercle d´efini par r=√R2−d2
2

Cours-r´esum´e
2`eme BAC PC/SVT
Prof: QALLOUQ ABDELLAH
P
H
Ω
(S)
P
H
Ω
(S)
P
H
Ω
(S)
R
(C)dr
d > R
d=R
d<R
Soient (S) = S(Ω, R) une sph`ere de centre Ω(a, b, c) et de rayon R, et A(xA, yA, zA) un point
de (S) et soit (P) le plan tangent `a (S) au point A.
Soit M(x, y, z)∈(E)
M∈(P)⇔−−→
AM ·−→
AΩ=0⇔(x−xA) (a−xA)+(y−yA) (b−yA)+(z−zA) (c−zA) = 0
D´efinition
(P) est tangent `a la sph`ere S(Ω, R)⇔d(Ω,(P)) = R
Propri´et´e
Intersection d’une Sph`ere (S) et d’une droite (D):
Soient (S) une sph`ere de centre Ω et de rayon Ret (D) une droite et soit Hle projet´e orthogonale
de Ω sur la droite (D). on pose d=d(Ω,(D)) = ΩH
#Qallouq Maths
Si d>Ralors (S)∩(D) = ∅.
Si d=Ralors (D) est tangent `a (S) en un pointH.
Si d<Ralors (D) perce la sph`ere (S) en deux points.
Ω Ω Ω
H
H
H
d=R
d<R d>R
3

Cours-r´esum´e
2`eme BAC PC/SVT
Prof: QALLOUQ ABDELLAH
Expression analytique du produit vectoriel #Qallouq Maths
Soient ~u(a, b, c) et ~v(a0, b0, c0) deux vecteurs
alors ~u ∧~v =
b b0
c c0
~
i−
a a0
c c0
~
j+
a a0
b b0
~
k
= (bc0−cb0)~
i−(ac0−ca0)~
j+ (ab0−ba0)~
k
D´efinition
Op´erations sur le produit vectoriel
~u ∧~v =−→
0⇔~u et ~v sont colin´eaires
~u ∧~v =−~v ∧~u
k~u ∧~v =k(~u ∧~v)/k ∈R
~u ∧k~v =k(~u ∧~v)/k ∈R
(~u +~v)∧~w = (~u ∧~w)+(~v ∧~w)
Propri´et´e
•−→
AB ∧−→
AC est un vecteur normal au plan
(ABC) (A;Bet Cnon align´es)
•A,B et C ´etant trois points non align´es
on a: M∈(ABC)⇔−−→
AM ·(−→
AB∧−→
AC) = 0
•Le nombre S=k−→
AB ∧−→
ACk
2est ´egal `a
la surface du triangle ABC.
•L’aire d’un parall´elogramme ABCD est
k−→
AB ∧−→
ACk
•Soient (D) = D(A, ~u) une droite passant
par Aet de vecteur directeur ~u et Ω un
point de l’espace.
On note d(Ω,(D)) la distance du point Ω
`a la droite (D) et on a:
d(Ω,(D)) = ||−→
AΩ∧~u||
||~u||
Propri´et´e
•Si (P) est un plan de vecteur normal ~n
et (P0) un plan de vecteur normal ~
n0
et si (P) et (P0) sont s´ecants alors
(P)∩(P0) est dirig´ee par ~n ∧~n0
•(P) et (P0) sont s´ecants ⇔~n et ~n0
sont non colin´eaires
Remarque
Parall´elisme et Orthogonalit´e
soient (P),(P0) deux plans et (D), (D0)
deux droites.
soient ~n, ~n0deux vecteurs normaux
respectivement `a (P),(P0) et ~u un
vecteur directeur de la droite (D)
•(P)//(P0)⇔(~n et ~n0sont colin´eaires)
⇔~n ∧~n0=−→
0
•(P)⊥(P0)⇔~n ⊥~n0⇔~n ·~n0= 0
•(D)//(P)⇔~n ⊥~u ⇔~n ·~u = 0
•(D)⊥(P)⇔(~n et ~u sont colin´eaires)
⇔~u ∧~n0=−→
0
Propri´et´e
”L’alg`ebre n’est qu’une
g´eom´etrie ´ecrite, la g´eom´etrie
n’est qu’une alg`ebre figur´ee.”
Sophie Germain
4
1
/
4
100%