Torseurs : Notions et Définitions en Sciences Industrielles
Telechargé par
fatima.ezzahra.hassouni2000

Annexe 06 - Notions sur les torseurs Page 1/4
MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 16/03/2010
Notions sur les torseurs
1) DEFINITIONS : RESULTANTE, MOMENT ET CHAMP DE MOMENT. .........................2
2) NOTATIONS : ECRITURE EN LIGNE OU EN COLONNE.............................................2
3) TRANSPORT D’UN TORSEUR (CHANGEMENT DE POINT DE REDUCTION)...........2
4) INVARIANTS D’UN TORSEUR. .....................................................................................3
Le premier invariant est un invariant vectoriel : la résultante R............................................................. 3
Le deuxième invariant est un invariant scalaire : le produit scalaire A
M.R (appelé automoment) ....... 3
5) EQUIPROJECTIVITE DU CHAMP DES MOMENTS : BA.MBA.M AB . ...................3
6) OPERATIONS SUR LES TORSEURS............................................................................3
Égalité de 2 torseurs. .............................................................................................................................. 3
Somme de 2 torseurs.............................................................................................................................. 3
Multiplication par un réel. ........................................................................................................................ 3
Comoment de 2 torseurs......................................................................................................................... 3
7) AXE CENTRAL...............................................................................................................4
Définition : résultante et moment colinéaires.......................................................................................... 4
Propriétés................................................................................................................................................ 4
8) TORSEURS PARTICULIERS. ........................................................................................4
Torseur nul. ............................................................................................................................................. 4
Torseur couple......................................................................................................................................... 4
Torseur glisseur....................................................................................................................................... 4

Annexe 06 - Notions sur les torseurs Page 2/4
MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 16/03/2010
La notion de torseur est extrêmement utile dans le cours de mécanique, pour permettre de modéliser
globalement le comportement cinématique des solides ou encore les actions transmissibles entre deux
solides à travers une liaison.
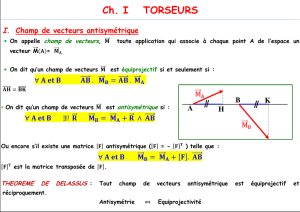
1) Définitions : résultante, moment et champ de moment.
Un torseur est un ensemble de deux champs de vecteurs :
Un champ R
Un champ M
On le note :
A
AM
R
T
Le premier champ, appelé résultante du torseur et noté R, est un champ constant,
Le deuxième champ, appelé moment du torseur et noté M, est un champ variable vérifiant la loi du champ
de moment : RABMM BA
A
M est le moment du torseur au point A.
B
M est le moment du torseur au point B.
R et A
M sont les éléments de réduction du torseur au point A.
R et B
M sont les éléments de réduction du torseur au point B.
2) Notations : écriture en ligne ou en colonne.
)z,y,x(
Azz
Ayy
Axx
A
AzAyAx
zyx
A
A
AMR MR MR
z.My.Mx.M z.Ry.Rx.R
M
R
T
On indique toujours, en bas à gauche, le point d’expression du torseur (appelé aussi point de réduction), ici A.
Pour l’écriture en colonne, il est impératif d’indiquer en bas à droite, la base dans laquelle R et A
M ont été
exprimés.
Pour l’écriture en ligne, il n’est pas utile de préciser la base d’expression de R et A
M puisque celle-ci figure
explicitement dans le torseur.
3) Transport d’un torseur (changement de point de réduction).
Compte tenu de la définition, on a :
RBAM R
M
R
M
R
TA
B
B
B
A
A
A
AM
R et
B
BM
R représentent le même torseur.
Il est important de noter que dans le nom du torseur,
T, le point en lequel ce torseur est exprimé
n’apparaît pas.
Écriture en ligne Écriture en colonne

Annexe 06 - Notions sur les torseurs Page 3/4
MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 16/03/2010
A B
A
M
Lieu de l’extrémité
de B
M
4) Invariants d’un torseur.
Quantités qui restent invariantes quelque soit le point de réduction.
Le premier invariant est un invariant vectoriel : la résultante R.
Le deuxième invariant est un invariant scalaire : le produit scalaire A
M.R (appelé automoment).
5) Equiprojectivité du champ des moments : BA.MBA.M AB .
BA.MBA).RBA(BA.MBA.M AAB
(propriété du produit vectoriel où le vecteur RBA
est
perpendiculaire au vecteur BA)
Donc le champ de moment est équiprojectif : BA.MBA.M AB .
6) Opérations sur les torseurs.
Pour effectuer des opérations sur des torseurs, ceux-ci doivent être exprimés au même point.
Égalité de 2 torseurs.
Deux torseurs
'M 'R
'T A
A et
''M ''R
''T A
A sont égaux si ''M'M
''R'R
AA
.
Somme de 2 torseurs.
Soient deux torseurs
'M 'R
'T A
A et
''M ''R
''T A
A.
Le torseur somme est :
''M'M ''R'R
''T'TT AA
A.
Multiplication par un réel.
Soient un réel et un torseur
A
AM
R
T.
Le torseur
T. est défini par :
A
AM. R.
T. .
Comoment de 2 torseurs.
Soient deux torseurs
'M 'R
'T A
A et
''M ''R
''T A
A.
Le comoment de ces deux torseurs est le scalaire défini par :
'M.''R''M.'R''T.'T AA .

Annexe 06 - Notions sur les torseurs Page 4/4
MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 16/03/2010
7) Axe central.
Définition : résultante et moment colinéaires.
L’axe central d’un torseur est la droite constituée par l’ensemble des points où résultante et moment sont
colinéaires.
Propriétés.
Soient A et B deux points de l’axe central.
Donc il existe 2 constantes A
et B
tels que R.M AA et R.M BB .
D'autre part selon la loi du champ de moment, on a RBAMM AB .
Or RBA donne un vecteur perpendiculaire à R (par définition du produit vectoriel).
Par conséquent, il faut que RBA soit nul, ce qui implique que : R.kBA et BA MM
Donc : - L’axe central est une droite de direction R.
- Tous les points de l’axe central ont même moment appelé moment central.
- Sur l’axe central, la norme du moment est minimale.
- Si le moment d’un torseur est nul en un point, alors ce point appartient à l’axe central du torseur.
8) Torseurs particuliers.
Torseur nul.
C’est le torseur :
0
0
0
TP
. Les éléments de réduction sont nuls en tout point.
Torseur couple.
C’est le torseur pour lequel la résultante est nulle :
A
AM
0
T.
AAB MRBAMM implique que le torseur a la même expression en tout point
P
PM
0
T.
Torseur glisseur.
C’est un torseur pour lequel il existe un point Q où le moment est nul :
0
R
TQ.
Soit
0M 0R
TA
A un torseur quelconque tel que 0M.R A
Soit C un point de l’axe central : donc par définition de l’axe central, R et C
M sont colinéaires.
Or 0R).RCA()R.M(R).RCAM(R.M AAC : donc R et C
M sont orthogonaux.
Un seul vecteur peut être à la fois colinéaire et orthogonal à un autre vecteur : le vecteur nul. Donc 0Mc.
Ainsi si le moment d’un torseur est perpendiculaire à sa résultante, ce torseur est un torseur glisseur.
NB : On sait que l'action de la pesanteur se modélise par un torseur glisseur car il existe le point G où le moment est nul.
Ainsi, nous devrons toujours avoir pour cette action 0M.R et son axe central sera la droite de direction R passant par G.
1
/
4
100%