Chapitre 1 Rappels et Introduction

Chapitre 1
Rappels et Introduction
1.1 Rappels sur les vecteurs.
On se place dans l’espace à trois dimensions, muni d’un repère orthonormé direct
E= (~e1, ~e2, ~e3). Un vecteur ~
Vest repéré par ses trois composantes v1, v2, v3:
~
V=
v1
v2
v3
E
=v1~e1+v2~e2+v3~e3=
3
X
i=1
vi~ei
1.1.1 Somme de deux vecteurs.
Soient deux vecteurs ~
Vet ~
W.
~
V=
v1
v2
v3
E
=
3
X
i=1
vi~eiet ~
W=
w1
w2
w3
E
=
3
X
i=1
wi~ei
Alors,
~
V+~
W=
v1+w1
v2+w2
v3+w3
E
=
3
X
i=1
(vi+wi)~ei.
Exemple :
♦
5

6CHAPITRE 1. RAPPELS ET INTRODUCTION
1.1.2 Multiplication par un scalaire (un nombre).
Soient λun nombre réel et ~
Vun vecteur :
~
V=
v1
v2
v3
E
=
3
X
i=1
vi~ei
Alors, le produit de ~
Vpar λest un vecteur :
λ~
V=
λv1
λv2
λv3
E
=
3
X
i=1
λvi~ei
Exemple :
♦
1.1.3 Produit scalaire de deux vecteurs.
Soient deux vecteurs ~
Vet ~
W.
~
V=
v1
v2
v3
E
=
3
X
i=1
vi~eiet ~
W=
w1
w2
w3
E
=
3
X
i=1
wi~ei
Alors, le produit scalaire de ces deux vecteurs est un nombre réel défini par :
~
V·~
W=v1w1+v2w2+v3w3=
3
X
i=1
viwi
Si ~
Vet ~
Wsont égaux, le produit scalaire est le carré de la longueur du vecteur, le carré
de sa norme
~
V·~
V=
~
V
2
=v2
1+v2
2+v2
3
=longueur de ~
V2
Remarque :
Un vecteur est de longueur nulle si et seulement si v2
1+v2
2+v2
3est nul. Donc si chacune
de ses composantes est nulle. Donc si il est nul. ♦

1.1. RAPPELS SUR LES VECTEURS. 7
Autre définition du produit scalaire :
~
V·~
W=
~
V
~
W
cos ~
V , ~
W
Propriété.
Deux vecteurs sont orthogonaux si et seulement si leur produit scalaire est nul
~
V⊥~
W⇐⇒ ~
V·~
W= 0.
♠
Pour obtenir les composantes d’un vecteur sur une base donnée, on effectue son produit
scalaire avec chacun des vecteurs de la base :
~
V·~ei=vi.
Exemple :
♦
1.1.4 Produit vectoriel de deux vecteurs.
Soient deux vecteurs ~
Vet ~
W.
~
V=
v1
v2
v3
E
=
3
X
i=1
vi~eiet ~
W=
w1
w2
w3
E
=
3
X
i=1
wi~ei
Alors, le produit vectoriel de ces deux vecteurs est un vecteur ~
Udéfini par :
~
U=~
V∧~
W=
v2w3−v3w2
v3w1−v1w3
v1w2−v2w1
ATTENTION !
Le produit vectoriel n’est pas commutatif. ~
V∧~
W=−~
W∧~
V♠

8CHAPITRE 1. RAPPELS ET INTRODUCTION
Le vecteur obtenu est à la fois perpendiculaire à ~
Vet à ~
W. Sa longueur est
~
V
~
W
sin ~
V , ~
W.
C’est l’aire du parallélogramme construit sur ~
Vet sur ~
W. Le trièdre ~
U, ~
V , ~
West direct.
Exemple :
♦
Propriété.
Deux vecteurs sont parallèles si et seulement si leur produit vectoriel est nul.
~
V // ~
W⇐⇒ ~
V∧~
W=~
0
♠
Formule du double produit vectoriel.
~
U∧~
V∧~
W=~
U·~
W~
V−~
U·~
V~
W♠
1.1.5 Produit mixte de trois vecteurs
Le produit mixte de trois vecteurs ~
U,~
V,~
West un nombre réel
~
U, ~
V , ~
W= det
u1v1w1
u2v2w2
u3v3w3
=~
U·~
V∧~
W
Ce nombre correspond au volume du parallélépipède construit sur ~
U,~
V,~
W.

1.2. RAPPELS SUR LES TORSEURS. 9
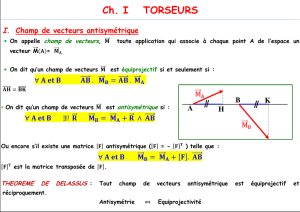
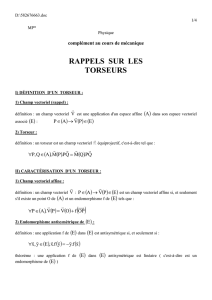
1.2 Rappels sur les torseurs.
Soit ~
Fune force appliquée en un point matériel P. Par définition, le moment en A
de cette force est ~
Mt
Ah~
Fi=−→
AP ∧~
F=~
F∧−→
P A.
On remarque que ~
Mt
Ph~
Fi=~
0et que ~
Mt
Ah~
Fi·~
F= 0.
Formule du changement de moment.
~
Mt
Bh~
Fi=−−→
BP ∧~
F=−→
BA ∧~
F+−→
AP ∧~
F
| {z }
~
Mt
A[~
F]
♠
1.2.1 Définition.
Dans l’espace à trois dimensions, un torseur [T]est défini par un vecteur libre ~
R
appelé résultante et un champ de vecteurs défini en tout point P, à valeurs ~
Mt
P[T]en
P, tels que :
∀P, ∀Q~
Mt
Q[T] = ~
Mt
P[T] + ~
R∧−→
P Q
~
Mt
P[T]est appelé moment en Pdu torseur [T].~
Ret ~
Mt
P[T]sont les éléments de
réduction du torseur [T], au point P.
Deux torseurs sont égaux, lorsqu’ils ont même résultante et même moment en tout
point. Les définitions imposées impliquent qu’une condition nécessaire et suffi-
sante pour que deux torseurs soient égaux est qu’ils aient mêmes éléments de réduction
en un point.
1.2.2 Propriétés.
√L’ensemble des torseurs forme un espace vectoriel de dimension 6 sur le corps des
réels.
√Le champ des vecteurs P7→ ~
Mt
P[T]est équiprojectif. Autrement dit :
∀P, ∀Q, −→
P Q ·~
Mt
P[T] = −→
P Q ·~
Mt
Q[T].
La projection de ~
Mt
Q[T]sur −→
P Q est égale à la projection de ~
Mt
P[T]sur −→
P Q.
∀P, ∀Q, ~
R·~
Mt
P[T] = ~
R·~
Mt
Q[T].
On note hcette valeur indépendante du point considéré : hest l’invariant scalaire du
torseur [T].
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%