Mécanique MPSI – PCSI : synthèse
Objectifs de cette synthèse :
– Restructurer les connaissances acquises,
– Remémorer les méthodes classiques,
– Redéfinir les outils nécessaires au cours de dynamique.
Remarque : ceci n’est pas un cours ! Il s’agit seulement de refaire un point rapide sur les
notions qui seront importantes pour le cours de dynamique.
Table des matières
1 Le cours de mécanique du solide en MPSI – PCSI 2
2 Étude géométrique des systèmes de solides 2
3 Cinématique 3
4 Statique 5
A Angles d’Euler 7
B Rappels sur les torseurs 8
C Tableau des liaisons 11
D Pour aller plus loin : résoudre graphiquement un problème plan [HORS PRO-
GRAMME] 12
D.1 Propriétés utilisées en cinématique graphique (problème plan) . . . . . . . . . 12
D.2 Propriétés utilisées en statique graphique (problème plan) . . . . . . . . . . . 12

Mécanique MPSI – PCSI : synthèse
1 Le cours de mécanique du solide en MPSI – PCSI
Trois parties majeures occupent le programme :
– l’étude géométrique : vecteurs position, paramétrage, fermeture géométrique des chaînes
de solides ;
– l’étude cinématique : vitesse des solides et systèmes de solides ;
– l’étude statique : équilibre des systèmes de solides, efforts.
Pour le moment, cinématique et statique sont totalement découplées. On remarque :
– la similitude des outils (torseurs et vecteurs),
– la dualité entre les torseurs de liaisons en statique et cinématique.
2 Étude géométrique des systèmes de solides
Avant tout, il faut préciser :
– le système étudié ;
– le référentiel choisi.
Solide & Paramétrage
Un solide est un système matériel tel que tout bipoint garde une longueur constante au
cours du temps (solide indéformable). La position d’un solide est définie par la position d’un
point (trois coordonnées scalaires) et une orientation (trois angles). Un solide est cinémati-
quement équivalent à un repère.
L’étude d’un système de solides nécessite un paramétrage, qui consiste à :
– attribuer un repère par solide,
– définir des paramètres de position entre les repères définis (angles ou longueurs), afin
de les positionner avec au maximum 1 angle entre deux repères.
Quelques rappels sur les projections de vecteurs
Les cadrans sont des outils de projection. Ils ont toujours
x1
x2
y1
y2
z =
1z2
θ
la même forme quel que soit l’angle réel entre les deux repères.
On dessine les repères avec θpositif et petit ('20o). L’inter-
prétation des sinus et cosinus est immédiate avec les "petits
cotés" et "grands cotés".
Graphe de structure
Le graphe de structure est une vue épurée du système de so-
lides : les ellipses sont les solides, les liens sont les liaisons entre
les solides. Le bâti est généralement représenté par un rectangle.
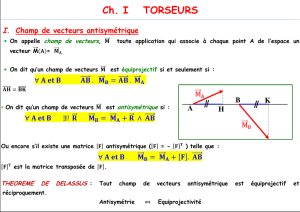
Notion de fermeture
Une fermeture est une équation représentant les contraintes
de bouclage dans les chaînes de solides.
Une fermeture géométrique est une relation de Chasles sur les vecteurs de positon où
chaque vecteur est soit fixe par rapport à un solide, soit défini par un paramètre de transla-
tion, pour former une des boucles du graphe de structure.
2

Mécanique MPSI – PCSI : synthèse
Une fermeture angulaire est une somme nulle d’angles d’un même plan formant une des
boucles du graphe de structure.
3 Cinématique
Le torseur cinématique représente la vitesse d’un solide S2par rapport à un autre S1:
nVS2/S1o=
A~
ΩS2/S1
~
VA,S2/S1
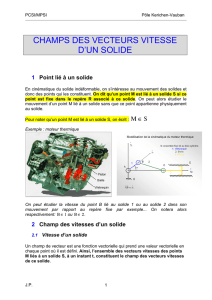
Il est composé du vecteur vitesse de rotation ~
ΩS2/S1et du vecteur vitesse d’un point A
quelconque ~
VA,S2/S1("vitesse du point Aappartenant à S2par rapport à S1" ou encore "vitesse
en Ade S2par rapport à S1"). La vitesse d’un point Mfixe de Spar rapport à R0est définie
par la dérivée du vecteur position par rapport à R0:
~
VM,S/R0=d~
OM
dt /R0
Calcul de la dérivée d’un vecteur ~
Upar rapport à R0
Première méthode : projeter le vecteur ~
Udans R0puis dériver les composantes. À EVITER !
Deuxième méthode : utiliser la relation de changement de référentiel dans la dérivation :
d~
U
dt /R1
=d~
U
dt /R2
+~
ΩR2/R1∧~
U
Si ~
Uest fixe dans R2, le problème de dérivation se transforme en produit vectoriel.
Torseur cinématique de liaison
Le torseur cinématique du mouvement relatif de deux solides liés par une liaison s’écrit
simplement et peut être posé en fonction de quelques paramètres de vitesses (voir Tableau des
liaisons en Annexe).
Composition des vitesses
La composition des mouvements s’effectue en additionnant les torseurs en un même
point :
nVS2/S1o+nVS1/S0o=nVS2/S0o
ce qui correspond à la composition des vitesses angulaires et à la composition des vitesses.
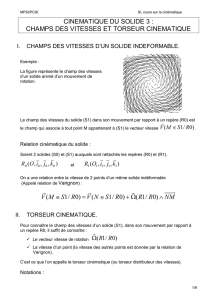
Formule de changement de point
Comme pour tout torseur, la formule de changement de point permet de donner la vi-
tesse en tout point d’un solide à partir de la connaissance du torseur en un point :
~
VB,S/R0=~
VA,S/R0+~
ΩS/R0∧~
AB
Deux méthodes d’approche de la cinématique
3

Mécanique MPSI – PCSI : synthèse
Position
Vitesse
Accélération
Vecteur position
+ dérivation
Torseur cinématique
+ composition de
mouvement
Dérivation Composition
des accélérations
Méthode d’étude cinématique des systèmes de solides
– modéliser le système en proposant un schéma cinématique,
– paramétrer le système,
– écrire les fermetures géométriques et trouver les relations entre paramètres de position,
– poser les torseurs cinématiques des liaisons,
– construire le graphe de structure et faire le bilan des équations à écrire,
– écrire les fermetures cinématiques torsorielles, vectorielles puis scalaires,
– résoudre et déterminer les paramètres inconnus du mouvement en fonction des para-
mètres connus.
Remarque : dans un cas plan, on ne considère que les translations dans le plan et les rota-
tions normales au plan.
Fermeture de chaîne cinématique
Une fermeture cinématique est une somme nulle de torseurs exprimés au même point.
Les équations obtenues par fermeture cinématique peuvent se retrouver par dérivation des
équations géométriques et angulaires. Il s’agira de choisir donc entre les méthodes géomé-
triques et cinématiques.
Vitesse de glissement – roulement sans glissement
Soit deux solides S1et S2en contact au point I, la vitesse de glissement de S2sur S1est
définie par :
~
VI,S2/S1=~
VI,S2/R0−~
VI,S1/R0
Lorsqu’il y a "roulement sans glissement", la vitesse de glissement est nulle : ~
VI,S2/S1=~
0.
Mouvement plan
Un solide S2est en mouvement plan de normale ~z1par rapport à S1si le torseur ciné-
matique de S2/S1s’écrit :
nVS2/S1o=
∀M∈S2~
ΩS2/S1=ω~z1
~
VM,S2/S1avec ~
VM,S2/S1.~z1= 0
Conséquences :
– Toutes les vitesses sont contenues dans des plans de normale ,
– Les vitesses de rotation sont normales au plan (suivant ~z1),
4

Mécanique MPSI – PCSI : synthèse
– Un mécanisme comportant une liaison hélicoïdale n’est pas plan (cf Maxpid).
– Le torseur cinématique d’un mouvement plan présente dans le cas général 3 inconnues
cinématiques au maximum contre 6 pour un mouvement quelconque.
– Chaque fermeture cinématique apporte 3 équations scalaires :
Fermeture sur les vitesses de rotation en projection suivant ~z1
Fermeture sur les vitesses en un point en projection suivant ~x1et ~y1.
– Une résolution graphique peut être mise en place.
Le torseur d’un mouvement plan est un glisseur car ∀M~
ΩS2/S1.~
VM,S2/S1= 0 (automo-
ment nul).
Un torseur glisseur possède un axe central (lieu où les vitesses sont nulles) parallèle à
~z1. On parle d’axe instantané de rotation. Soit I un point de l’axe central, à tout instant, le
mouvement plan est un mouvement de rotation d’axe (I, ~z1).
Centre instantané de rotation
La trace de cet axe dans le plan d’étude est un point appelé centre instantané de rotation
(C.I.R.). On le note I12 ou I21. Le vecteur ~
IM est perpendiculaire à ~
VM,S2/S1car :
∀Mdans leplan ~
VM,S2/S1=~
ΩS2/S1∧~
IM
4 Statique
Notion d’isolement
Isoler un système de solide, c’est définir une frontière séparant ce qui est intérieur au sys-
tème de ce qui est considéré comme extérieur, en vue de faire le bilan des actions mécaniques
extérieures agissant sur le système et appliquer le PFS.
Action mécanique
Une action mécanique représente l’effort exercé par un système matériel S1sur un autre
système matériel S2. Dans le cas des solides, une action mécanique est complètement définie
par un torseur : le torseur d’action mécanique ou torseur statique.
nTS1/S2o=
A~
FS1/S2
~
MA,S1/S2
où ~
FS1/S2est la force exercée par S1sur S2et ~
MA,S1/S2est le moment en Ade S1sur S2.
Torseur statique des liaisons (ou torseur d’action mécanique des liaisons)
Un certain nombre de liaison parfaite entre solides sont normalisées. Leurs torseurs sta-
tiques sont classiques (voir le Tableau des liaisons en Annexe).
On remarque que les torseurs statiques et cinématiques sont duaux : si on appelle nV1/2o
et nT1/2oles torseurs cinématique et statique d’une même liaison entre les solides 1 et 2,
alors la forme linéaire suivante est nulle :
P=nV1/2o⊗nT1/2o= 0
Cela correspond à la puissance dissipée dans la liaison, qui est nulle sous l’hypothèse de
"liaison parfaite".
5
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%