Sciences Industrielles pour l`Ingénieur

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 1 -
Sciences Industrielles pour l’Ingénieur
(D'après sujet de concours)
Présentation :
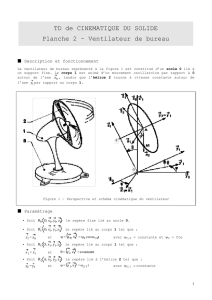
On s’intéresse à une Echelle Pivotante Automatique à commande Séquentielle. Ce
système conçu et commercialisé par la société CAMIVA est monté sur le châssis d’un
camion de pompiers et permet de déplacer une plate-forme pouvant recevoir deux
personnes et un brancard (charge maxi 270 kg) le plus rapidement possible et en toute
sécurité.
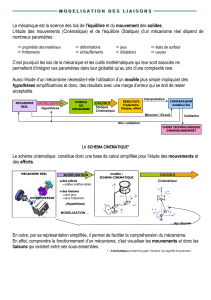
Le schéma cinématique
(avec la tourelle non
orientée) est le suivant :
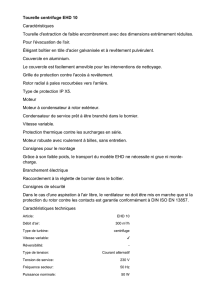
Problème technique :
Pour des raisons de confort et de sécurité, il est nécessaire que
pendant la phase de "dressage" de l'échelle (pivotement du
berceau 2 et déploiement de l'échelle 3), la norme de
l'accélération subie par une personne dans la nacelle ne
dépasse pas un niveau défini.
On doit donc commencer par déterminer l'expression de la vitesse d'un point D de la nacelle par rapport au sol.
Paramétrage :
Ce système est constitué de 5 CEC :
• Le châssis 0, de repère associé 0(,0
,0
,0
), fixe par rapport au sol, tel que l'axe (,0
) soit dirigé suivant la verticale
ascendante ;
• La tourelle 1, de repère associé 1(,1
,1
,1
), en mouvement de rotation d'axe (,0
) par rapport au châssis 0 tel que
0
= 1
et 1 = (0
,1
) ;
• Le berceau 2, de repère associé 2(,2
,2
,2
), en mouvement de rotation d'axe (,1
) par rapport à la tourelle 1 tel que
= .1
+ .1
(a et b constantes >0),
= .2
(c constante >0), 1
= 2
et 2 = (1
,2
) ;
• L'échelle 3, de repère associé 3(,3
,3
,3
), en mouvement de translation rectiligne de direction 2
par rapport au berceau 2
tel que
= (). 2
.
• Le vérin de dressage 4 (corps) + 5 (tige).
1/Tracer au préalable les figures planes représentant les paramètres variables dans les bases Bi.
2/ Donner la forme vectorielle globale et détaillée du torseur / de chaque liaison constituant le modèle cinématique, exprimé au
centre de la liaison. On rajoutera les points, axes et /
= nécessaires.
3/ Proposer une relation de composition des torseurs qui permettra de définir la vitesse demandée. En quel point devra-t-on exprimer
chaque torseur ?
4/ Exprimer 3/0 au point D, dans la base B2, et présenter le résultat sous la forme en colonnes.
5/ On donne : a = c = 1 m ; b = 2 m ; l'échelle se "dresse" de 30 m et 75° en 30 s.
Calculer ,3/0
lorsque d = 25 m, 1 = 0° et 2 = 65° (déploiement quasi-complet).
TP
Centre d’Intérêt 7 :
TRANSMETTRE l'énergie –
Aspect MOUVEMENT
Compétences : Modéliser, Résoudre
CINEMATIQUE DU SOLIDE INDEFORMABLE :
Associer aux liaisons un torseur cinématique
Déterminer le vecteur vitesse d'un point d'un solide par rapport à un autre
ECHELLE DE POMPIER E.P.A.S.
COURS
TD 6
LE SYSTEME "REEL"
si tourelle non orientée
LE MODELE
CINEMATIQUE
2
si tourelle
non
orientée
1
/
1
100%