Sciences Industrielles pour l`Ingénieur/Cinématique/Cours

PCSI/MPSI Pôle Kerichen-Vauban
J.P.
1
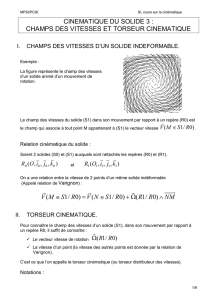
CHAMPS DES VECTEURS VITESSE
D’UN SOLIDE
1 Point lié à un solide
En cinématique du solide indéformable, on s’intéresse au mouvement des solides et
donc des points qui les constituent. On dit qu’un point M est lié à un solide S si ce
point est fixe dans le repère R associé à ce solide. On peut alors étudier le
mouvement d’un point M lié à un solide sans que ce point appartienne physiquement
au solide.
Pour noter qu’un point M est lié à un solide S, on écrit :
Exemple : moteur thermique
On peut étudier la vitesse du point B lié au solide 1 ou au solide 2 dans son
mouvement par rapport au repère fixe par exemple... On notera alors
respectivement: ou .
2 Champ des vitesses d’un solide
2.1 Vitesse d’un solide
Un champ de vecteur est une fonction vectorielle qui prend une valeur vectorielle en
chaque point où il est défini. Ainsi, l’ensemble des vecteurs vitesses des points
M liés à un solide S, à un instant t, constituent le champ des vecteurs vitesses
de ce solide.

PCSI/MPSI Pôle Kerichen-Vauban
J.P.
2
On notera la vitesse d’un point M lié à un solide S dans son mouvement par rapport
à un repère R0 :
ou
L’étude de la cinématique d’un solide consistera à déterminer ce champ de vecteur.
2.2 Equiprojectivité du champ des vecteurs vitesses
Soient A et B deux points liés à un solide S, on a alors la propriété suivante :
On dit que le champ des vitesses est équiprojectif : les projections des vitesses d’un
point A et d’un point B liés à un solide sur le vecteur sont égales. Cette relation
est surtout utile en résolution graphique.
Démonstration :
Reprenons la définition d’un solide indéformable :
On a alors : avec
d’où :
Exemple : illustration sur le moteur thermique. On cherche à déterminer par
la seule connaissance de la vitesse de rotation du vilebrequin en utilisant la propriété
d’équiprojectivité.
2.3 Torseur cinématique
Propriété remarquable du champ des vecteurs vitesses :
Nous avons vu que d’après la formule de dérivée vectorielle, la dérivée d’un vecteur
où A et B sont deux points liés à un solide est donnée par :

PCSI/MPSI Pôle Kerichen-Vauban
J.P.
3
Avec : et :
On obtient alors :
D’où :
Que l’on note plus fréquemment (en permutant le produit vectoriel) :
Cette propriété est une propriété fondamentale qui permet de définir le champ des
vecteurs vitesses d’un solide indéformable. Cela signifie que pour connaître la
vitesse de n’importe quel point d’un solide S, il suffit de connaître :
• Le vecteur taux de rotation du solide S dans son mouvement par
rapport à un repère R0
• Le vecteur vitesse de n’importe quel point M lié à S :
Ces deux éléments sont des champs de vecteurs :
• est un champ uniforme qui ne dépend pas du point considéré, il ne
dépend que du solide S et du repère R0
• Le champ des vecteurs vitesses de tous les points liés au solide S constitue
ce que l’on appelle un champ de moment défini par la relation :
Remarque : moyen mnémotechnique BABAR.
Le champ des vecteurs vitesse d’un solide est donc le champ des moments
d’un TORSEUR. Le torseur est un outil vectoriel qui permet de représenter un
champ de vecteurs présentant les propriétés que nous venons d’établir.
On définit ainsi le torseur cinématique d’un solide S dans son mouvement par
rapport au repère R0 écrit au point M par :
les vecteurs et sont les éléments de réduction du torseur :
• est la résultante du torseur cinématique.
• est le moment du torseur cinématique.

PCSI/MPSI Pôle Kerichen-Vauban
J.P.
4
Le mouvement de S par rapport à R0 est totalement défini par l’expression du torseur
.
On peut changer le point où est exprimé le torseur en utilisant la propriété du champ
des vitesses :
On transporte le moment du point A au point B, on peut donc écrire
à partir de .
2.3.1 Composition des vitesses
On s’intéresse aux mouvements relatifs de 3 solides notés 1,2 et 3. Nous avons vu
les propriétés de composition des vecteurs rotation et des vecteurs vitesse :
et
on en déduit la propriété de composition sur le torseur cinématique :
d’où :
Cette relation se généralise à n solides. Mais attention, pour être sommés, les
torseurs doivent impérativement être écrits aux même points.
2.3.2 Invariants du torseur cinématique
Le torseur cinématique possède d’autres propriétés remarquables : les invariants.
Ce sont les quantités qui ne changent pas en fonction du point considéré.
Premier invariant :
Il s’agit simplement de la résultante cinématique (vecteur taux de rotation)
qui comme nous l’avons vu est un champ uniforme.

PCSI/MPSI Pôle Kerichen-Vauban
J.P.
5
Deuxième invariant :
Le produit scalaire : est indépendant du point M où est
exprimé le torseur cinématique.
Démonstration :
Le champ des vecteurs vitesse est défini pour deux points de S par la relation :
D’où :
Or est nul donc :
3 Accélération des points d’un solide
On s’intéresse à présent au champ des accélérations d’un solide indéformable.
L’accélération d’un point M lié à un solide S est définie par :
Reprenons la formule de transport du moment cinématique et dérivons la :
soit : .
Développons :
,
avec : ,
d’où :
Conclusion : le champ des vecteurs accélération n’est pas un champ de moment de
torseur. Le champ des vecteurs accélération d’un solide ne présente aucune
propriété particulière exploitable.
 6
7
8
6
7
8
1
/
8
100%