Le Torseur

Le Torseur
●Le torseur : un outil mathématique
{T}= R
M(o)
o
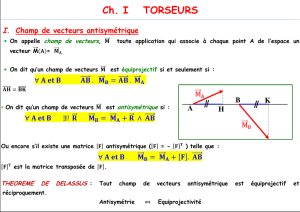
Il représente un champ
de vecteur équiprojectif.
Champ des vitesses d'un solide en rotation
S2I Lycée Corneille
T.CHIRLE

Le Torseur
●Le torseur : adapté à la mécanique des solides.
Le torseur est un outil mathématique particulièrement adapté aux calculs de
mécanique du solide indéformable. Il apparaît dans les trois chapitres du
programme de S2I :
∗
Cinématique du solide
→
torseur distributeur des vitesses.
∗
Modélisation des actions mécaniques
→
torseur des actions mécaniques.
∗
Dynamique
→
torseur cinétique
→
torseur dynamique.
Avantages de la notation torsorielle :
● elle unifie les notations et permet de définir simplement : le champ des
vitesses d'un solide; une action mécanique; une énergie; une puissance
● elle permet d'énoncer de manière concise les principes et théorèmes
de la mécanique des solides
S2I Lycée Corneille
T.CHIRLE

Le Torseur
●Définition
soit
E
l’espace affine à 3 dimensions et
E
l’espace vectoriel associé. On
appelle torseur que l’on note
{ T }
, l’ensemble défini dans ces espaces:
∗
d’un vecteur
R
appelé résultante du torseur
{ T }.
∗
D’un champ vectoriel défini en tous point
P
de
E
et noté
M
P
. Ce champ
vectoriel appelé moment au point P du torseur
{ T }
vérifie la relation
suivante:
∀ = + ∧
( , ):
A B M M AB R
A B
Relation de changement de point d’un champ de moment de torseur
S2I Lycée Corneille
T.CHIRLE

Le Torseur
●Notations
{T}= R
Mo
O
Résultante du torseur {T}
Moment en O du torseur {T}
Point de réduction
Vecteur ne dépendant pas du point
Vecteur dépendant du point
Ces deux vecteurs sont les
éléments de réduction
du torseur { T } au point O
S2I Lycée Corneille
T.CHIRLE

Le Torseur
●Notations
{ }
( )
T
A
X L
Y M
Z N
avec R X i Y j Z k
M L i M j N k
B
A
=
= + +
= + +
Si l'on désire travailler dans une base orthonormée directe B(i,j,k), on notera le torseur:
Toujours préciser la base de projection
S2I Lycée Corneille
T.CHIRLE
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
1
/
42
100%