Gardons le cap

Gardons le cap
Alain Stucki, Lycée cantonal de Porrentruy
«Ce nom marin de Rhumbs a intrigué quelques personnes,…. Comme l'aiguille du compas demeure assez
constante, tandis que la route varie, ainsi peut-on regarder les caprices ou bien les applications successives de
notre pensée,… comme des écarts définis par contraste avec je ne sais quelle constance dans l'intention
p
rofonde et essentielle de l'esprit,…»
Paul Valéry, Rhumbs, p.9
I. Introduction
La courbe déterminée par un bateau qui suit une direction faisant un angle constant avec les méridiens s'appelle
une loxodromie (ou rhumb). La trajectoire loxodromique reliant deux points du globe terrestre ne constitue en
général pas le chemin le plus court entre ces deux points, celui-ci étant réalisé le long d'une courbe appelée
orthodromie (un arc de grand cercle sur le globe).
Dans cet article, nous allons nous intéresser plus particulièrement à la loxodromie.
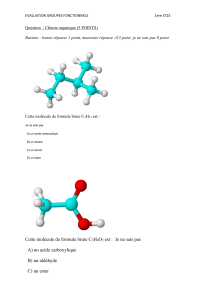
II. Coordonnées géographiques et géocentriques
Rappelons qu'un méridien est un grand cercle passant par les pôles N et S (le méridien de référence étant celui de
Greenwich), et qu'un parallèle est un cercle du globe dont le plan est perpendiculaire à l'axe @NSD (le parallèle
de référence étant l'équateur). L'angle j est la longitude, Est ou Ouest, du point P, et l'angle
l
est sa latitude,
N
ord ou Sud.
xy
z
N
S
J
P
I
O
R
jl
Coordonnées géographiques :
P
Hj,lL
Coordonnées géocentriques :
P
Hx,y,zL óPHRcosHlLcosHjL,RcosHlLsinHjL,RsinHlLL

III. Détermination du cap
Partons d'un point
A
sur le globe et déplaçons-nous vers l'Est en maintenant le cap a0, 0 °<a
0<90 ° (angle
entre un méridien et notre direction). Sur la loxodromie ainsi définie, à chaque valeur de je@0, ∞@, exprimée en
radians, correspond une valeur de l, 0§l=lHjL§p
ÅÅÅÅÅÅ
2. Le vecteur-position d'un point P de cette loxodromie
s'écrit
OP
öøø =i
k
j
j
j
j
j
j
j
RcosHlLcosHjL
RcosHlLsinHjL
RsinHlLy
{
z
z
z
z
z
z
z
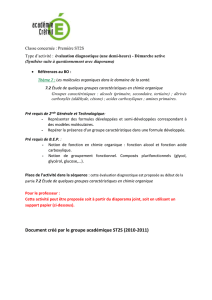
Appelons tm
ö le vecteur unitaire tangent au méridien, et tl
ö le vecteur unitaire tangent à la loxodromie, les sens
étant définis comme le montre la figure ci-dessous
N
OP
◊÷÷÷÷÷÷÷
t
◊m
t
◊l
O
A
P
S
a0
Constatons que le long d'un méridien caractérisé par j=constante, tm
ö=1
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∞
v
m
öø
¥
vm
öø , où vm
öø est la vitesse le long
du méridien si l est considéré comme le temps. Calculons vm
ö
ø
vm
öø =d
ÅÅÅÅÅÅÅÅÅ
dlOP
öøø = d
ÅÅÅÅÅÅÅÅÅ
dli
k
j
j
j
j
j
j
j
RcosHlLcosHjL
RcosHlLsinHjL
RsinHlLy
{
z
z
z
z
z
z
z=i
k
j
j
j
j
j
j
j
-RsinHlLcosHjL
-RsinHlLsinHjL
RcosHlLy
{
z
z
z
z
z
z
z=Ri
k
j
j
j
j
j
j
j
-sinHlLcosHjL
-sinHlLsinHjL
cosHlLy
{
z
z
z
z
z
z
z
et la norme au carré de ce vecteur
∞vm
öø ¥2=R2H sin2 HlLcos2 HjL+sin2 HlLsin2 HjL+cos2 HlLN
=R2Hsin2 HlL@cos2 HlL+sin2 HlLD +cos2 HlLL
=R2Hsin2 HlL+cos2 HlLL=R2
Par conséquent
tm
ô = i
k
j
j
j
j
j
j
j
-sinHlLcosHjL
-sinHlLsinHjL
cosHlL
y
{
z
z
z
z
z
z
z

De manière analogue, tl
ö=1
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
∞v
l
ö¥ vl
ö, où vl
ö est la vitesse le long de la loxodromie si j représente le temps, et
sans oublier que l=lHjL. On a donc
vl
ö=d
ÅÅÅÅÅÅÅÅÅ
djOP
ö
ø
ø = d
ÅÅÅÅÅÅÅÅÅ
dji
k
j
j
j
j
j
j
j
RcosHlLcosHjL
RcosHlLsinHjL
RsinHlLy
{
z
z
z
z
z
z
z =
R
i
k
j
j
j
j
j
j
j
-l' sinHlLcosHjL-cosHlLsinHjL
-l' sinHlLsinHjL+cosHlLcosHjL
l' cosHlLy
{
z
z
z
z
z
z
z
Calculons la norme au carré de ce vecteur
∞vl
ö¥2=R2Hl'2 sin2 HlLcos2 HjL+2 l' sinHlLsinHjLcosHlLcosHjL+cos2 HlL sin2 HjL
+ l'2 sin2 HlLsin2 HjL-2 l' sinHlLsinHjLcosHlLcosHjL+cos2 HlL cos2 HjL
+ l'2 cos2 HlLL
=R2Hl'2 Hsin2HlL@cos2 HjL+sin2 HjLD+cos2 HlLL+cos2 HlL@sin2 HjL+cos2 HjLDL
=R2 Hl'2+cos2 HlLL
Par conséquent
tl
ô = 1
ÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄ
"##########################
l'2+cos2 HlL
i
k
j
j
j
j
j
j
j
-l' sinHlLcosHjL-cosHlLsinHjL
-l' sinHlLsinHjL+cosHlLcosHjL
l'cosHlL
y
{
z
z
z
z
z
z
z
‡Ecrivons à présent les formes trigonométrique et analytique du produit scalaire des vecteurs tl
ö et tm
ö
1) tl
öÿtm
ö=∞tl
ö¥ÿ∞tm
ö¥ÿcosHa0L= cosHa0L, car les vecteurs sont unitaires
2) tl
öÿtm
ö= 1
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
"#########################
l'2+cos2 HlL i
k
j
j
j
j
j
j
j
-l' sinHlLcosHjL-cosHlLsinHjL
-l' sinHlLsinHjL+cosHlLcosHjL
l' cosHlLy
{
z
z
z
z
z
z
zÿi
k
j
j
j
j
j
j
j
-sinHlLcosHjL
-sinHlLsinHjL
cosHlLy
{
z
z
z
z
z
z
z
=1
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
"#########################
l'2+cos2 HlLHl' sin2HlLcos2HjL+cosHlLsinHjL sinHlLcosHjL
+l' sin2HlLsin2HjL-cosHlLcosHjL sinHlLsinHjL
+l' cos2HlLL
=1
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
"#########################
l'2+cos2 HlLHl'Hsin2HlL@cos2 HjL+sin2 HjLD +cos2HlLLL
= 1
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
"#########################
l'2+cos2 HlLÿl'
On en déduit la relation
cosHa0L=
l'
ÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄ
"##########################
l'2+cos2 HlL
Exprimons ensuite sinHa0L
sinHa0L=è!!!!!!!!!!!!!!!!!!!!!!!
1-cos2Ha0L=$%%%%%%%%%%%%%%%%%%%%%%%%%%%
1-l'2
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
l'2+cos2 HlL=$%%%%%%%%%%%%%%%%%%%%%%%%%%%
l'2+cos2 HlL-l'2
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
l'2+cos2 HlL=cosHlL
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
"#########################
l'2+cos2 HlL
et encore cotHa0L
cotHa0L=cosHa0L
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
sinHa0L=
l'
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
"##########################
l'2+cos2 HlL
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
cosHlL
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
"##########################
l'2+cos2 HlL
=l'
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
cosHlL

‡L'équation cotHa0L=l'
ÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄÄ
cosHlL établit un lien implicite entre a0, j et l, mais la dérivée l' est indésirable.
Intégrons donc cette équation
ŸcotHa0L„j = Ÿl'
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
cosHlL„j
jcotHa0L=Ÿl'
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
cosHlL„j = Ÿl'
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
sinHl+ p
ÅÅÅÅÅÅÅ
2L „j = ‡l'
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
2 sinIl
ÅÅÅÅÅÅÅ
2+p
ÅÅÅÅÅÅÅ
4M cosIl
ÅÅÅÅÅÅÅ
2+p
ÅÅÅÅÅÅÅ
4M „j
=‡l'
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
2 tanIl
ÅÅÅÅÅÅÅ
2+p
ÅÅÅÅÅÅÅ
4M cos2Il
ÅÅÅÅÅÅÅ
2+p
ÅÅÅÅÅÅÅ
4M „j
=‡1
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
cos2Il
ÅÅÅÅÅÅÅÅÅÅÅ
2+p
ÅÅÅÅÅÅÅÅÅÅÅ
4Mÿl'
ÅÅÅÅÅÅÅÅ
2
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
tanIl
ÅÅÅÅÅÅÅ
2+p
ÅÅÅÅÅÅÅ
4M „j du
type Ÿu'
ÅÅÅÅÅÅÅ
u=ln »u»
=ln »tanHl
ÅÅÅÅÅÅ
2+p
ÅÅÅÅÅÅ
4L»+c
Comme 0 §l§ p
ÅÅÅÅÅÅ
2, la valeur absolue est inutile, et l'égalité prend la forme
(1)
jcotHa0L=lnItanI
l
ÄÄÄÄÄÄ
2+p
ÄÄÄÄÄÄ
4MM +c
La valeur de la constante c s'obtient en exprimant que la loxodromie passe par un point
A
H
j
A,lAL. Par exemple,
si
A
H
j
A,lA) =
I
H0, 0L, alors c=0, et le cap permettant de relier le point
I
H0, 0L au point PH
j
,lL est donné
par
a0=arccot ln ItanI
l
ÅÅÅÅÅÅÅ
2+p
ÅÅÅÅÅÅÅ
4MM
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
j
IV. Equation de la loxodromie
L'équation en coordonnées géographiques de la loxodromie reliant
A
et
P
sur le globe s'obtient à partir de (1) en
explicitant l=lHjL. Nous obtenons successivement
jcotHa0L-c=ln HtanHl
ÅÅÅÅÅÅ
2+p
ÅÅÅÅÅÅ
4LL
‰jcotHa0L-c=tanHl
ÅÅÅÅÅÅ
2+p
ÅÅÅÅÅÅ
4L
arctan H‰jcotHa0L-cL=l
ÅÅÅÅÅÅ
2+p
ÅÅÅÅÅÅÅ
4
arctan H‰jcotHa0L-cL-p
ÅÅÅÅÅÅ
4=l
ÅÅÅÅÅÅ
2
et finalement, l'équation de la loxodromie
l HjL=2 arctan H„jcot
H
a0
L
-cL-p
ÄÄÄÄÄÄÄ
2
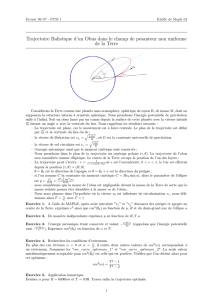
Observons que la fonction l(j) est croissante, et que lim
jz∞lHjL=p
ÅÅÅÅÅÅÅ
2. Ainsi, pour 0 °<a
0<90 °, les trajectoires
loxodromiques sont des courbes qui s'enroulent sur le globe, tous les chemins menant au pôle Nord.

IH0,0L
N
S
La projection stéréographique (de centre le pôle Nord) sur le plan de l'équateur d'une loxodromie est une spirale
logarithmique, et sa projection orthogonale sur le plan de l'équateur est une spirale de Poinsot.
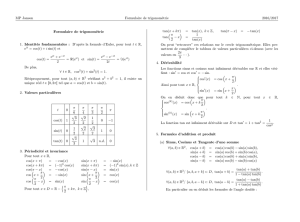
V. Un rapide coup d'oeil sur l'orthodromie
Contemplons sur un dessin la loxodromie (en trait plein) et l'orthodromie reliant la ville de
Porrentruy H7 °E,47 °NL à la ville de MiamiH80 °O,26 °NL.
Porrentruy
Miami
IH0,0L
N
S
Au départ de Porrentruy, pour suivre la trajectoire loxodromique, il faut se déplacer vers des latitudes Sud, alors
que pour suivre la trajectoire orthodromique, il faut d'abord se déplacer vers des latitudes Nord !
VI. Commentaires et conclusion
La Terre (modélisée simplement par une sphère) se prête bien aux mathématiques appliquées. Elle permet
d'aborder, dans un cadre concret, des sujets variés de difficultés diverses.
Si l'objet traité ici fait appel à des notions d'analyse et de géométrie vectorielle dans
R
3, d'autres thèmes
n'exigent pas de tels outils. Par exemple, il n'est pas difficile de calculer la longueur du plus court chemin entre
Porrentruy et Miami. Cependant, pour réaliser ce petit projet, il faut introduire les systèmes de coordonnées
 6
6
1
/
6
100%