Mécanique Terrestre et Céleste

MacXIair:MPSI:Mécanique:Cours M 10 Terrestre ds - 18 juin 2012 page 1 / 4
Mécanique 10
Mécanique Céleste et terrestre
I. Les référentiels
I.1. Référentiels de Copernic et de Kepler
I.1.1. Référentiel de Copernic RC
De centre C centre de masse du système solaire + trois étoiles assez éloignées pour être considérées
comme fixes.
C'est, pour le système solaire, la meilleure approximation possible d'un référentiel galiléen
I.1.2. Référentiel de Kepler ou Héliocentrique RK
Se déduit du précédent par une translation d'origine de C vers S centre du Soleil.
Les axes peuvent être choisis parallèles à ceux d'un repère de Copernic.
C'est un référentiel galiléen avec une excellente approximation.
I.1.3. Mouvement de la Terre dans le référentiel de Kepler
Dans RK, le centre T de la Terre décrit une trajectoire elliptique, pratiquement circulaire, (excentricité
e = 0,01673, l'excentricité est le rapport entre la distance des foyers de l'ellipse et le grand axe, pour un
cercle les foyers étant confondus e = 0). Le plan de cette trajectoire est le plan de l'écliptique, la distance
moyenne TS ≈ 1,5!1011 m (sert d'unité de longueur en astronomie : 1 UA = 149598600 km).
La durée de révolution de la Terre autour du Soleil est l'année sidérale et vaut 365,25 jours sachant qu'un
jour est 1 d = 86400 s soit 24 heures de 3600 s.
La Terre est petite devant le rayon de son orbite (rayon RT = 6,4!106 m << 1,5!1011 m). Elle peut être
considérée comme ponctuelle lorsque l'on étudie son mouvement autour du Soleil.
De ce fait, le référentiel de Kepler n'est pas le plus adapté pour étudier le mouvement de rotation de la
Terre sur elle même.
I.2. Les référentiels liés à la Terre
I.2.1. Géocentrique RG
Centre de la Terre T, trois étoiles fixes → en translation circulaire uniforme dans le référentiel de Copernic
d'accélération
€
a
(T)/RC (par définition de la translation).
Par ailleurs il n'est lié qu'au centre de la Terre.
On peut calculer la norme de
€
a
(T)/RC sachant que T décrit en gros un cercle de rayon 1,5!1011 m en
365,25 ! 86400 s → a = ST!ω2 ≈ 6!10-3 m!s-2.
Pour les mouvements des véhicules terrestres, ce n'est pas énorme et on a pu négliger la force d'inertie
d'entraînement, mais c'est décelable.
Le référentiel géocentrique n'est pas strictement galiléen et la RFD en référentiel géocentrique devra
parfois être écrite en considérant la force d'inertie d'entraînement - m!
€
a
(T)/RC.
I.2.2. Terrestres RT
Centrés en un point O de la surface de la Terre, RT est animé par rapport à RG d'un mouvement de
rotation uniforme de vecteur
Ω
porté par l'axe des pôles (qui pointe en gros vers l'étoile polaire). Cet axe est
incliné de 23 ° par rapport à la normale au plan de l'écliptique.
La période de révolution de la Terre autour de cet axe dans RG, est Tsid = 86164 s. Elle est appelée jour
sidéral qui est donc plus court que le jour d.
Le référentiel terrestre a été considéré comme galiléen en première approximation pour des mouvements
de courte durée et de faibles distances.
Mais il n'est pas galiléen et il sera nécessaire de considérer les forces d'inertie pour appliquer la seconde loi
de Newton dans ce référentiel.

MacXIair:MPSI:Mécanique:Cours M 10 Terrestre ds - 18 juin 2012 page 2 / 4
II. Champ de gravitation
II.1. Champ de gravitation d'une masse ponctuelle
II.1.1. Interaction gravitationnelle
Rappel de la Loi de Newton :
€
F
1/2 = -
€
G⋅m1⋅m2
r2
!
€
e
12.
C'est une des interactions fondamentale de la nature dont le domaine de validité va de l'échelle
microscopique à l'échelle intergalactique.
II.1.2. Masses inertielle et gravitationnelle
Remarque : dans cette loi, les termes m1 et m2 représentent des masses gravitationnelles. Ces masses
sont proportionnelles aux masses inertielles (celles de
€
F
= m!
€
a
) comme le vérifient les expériences les plus
modernes et les plus précises (à 10-13 près). Dans le système d'unités international, elles s'expriment avec le
même nombre, car elles ont été identifiées par le choix de la valeur numérique de la constante
G = 6,67!10-11 N!m2!kg-2.
II.1.3. Champ gravitationnel
Donc au voisinage d'un point de masse m1, une masse m2 placée en M est soumise à un champ de
force ne dépendant que de la position de M.
€
F
(M) = m2!
€
G
(M) où
€
G
(M) = -
€
G⋅m1
r2
!
€
e
1M est le champ
gravitationnel crée par m1 en M.
II.2. Cas des astres
II.2.1. Problème de dimension
Un astre n'est pas un point matériel : si l'on s'intéresse par exemple à la mécanique terrestre, on est conduit
à considérer les forces de gravitation exercées par la Terre sur un point M de masse m situé au voisinage de
sa surface. Et d'un point M au voisinage de la Terre il est difficile d'admettre que la Terre est un point.
Le théorème de Gauss, que nous aurons l'occasion de démontrer en électromagnétisme, permet de
déterminer le champ radial
€
G
(M) crée par une répartition de masse à symétrie sphérique.
Soit un corps, sphérique de centre O et de rayon R, a pour masse M =
€
V
∫∫∫
ρ!dτ où ρ est la masse
volumique. Si ρ ne dépend que de la distance r au centre O, le corps est à répartition de matière à symétrie
sphérique.
A l'extérieur de ce corps, mais à l'extérieur seulement, donc pour tout r > R, le champ radial
€
G
(M) peut
être calculé en assimilant la sphère à une masse M concentrée en son centre O.
Autrement dit, vu de l'extérieur, on peut assimiler l'astre à un point confondu avec son centre et ayant la
masse de l'astre.
II.2.2. Problème de pluralité
Un point matériel situé au voisinage de la Terre est également soumis aux interactions de gravitation des
autres astres de l'Univers. Donc le champ de gravitation en M est :
€
G
(M) =
€
G
T(M) +
€
G
L(M) +
€
G
S(M) + etc.… =
€
G
T(M) +
€
A
(M)
Le terme
€
A
(M) regroupant tous les champs en M des autres astres est dit champ "extra-astral". Si on est
au voisinage de la Terre, on peut considérer
€
A
(M) comme quasi uniforme →
€
A
(M) ≈
€
A
(T).
En général, pour les véhicules terrestres, ces termes sont négligeables. On peut calculer que les moins
négligeables sont les champs créés en M par la Lune ou le Soleil dont on constate l'effet sur les marées.
II.2.3. Problème de référentiel
Les astres sont en mouvement, ils ne constituent pas des référentiels galiléens. Il faudra donc considérer les
forces d'inertie pour écrire la RFD.
Soit un point M au voisinage de la Terre, dont on étudie le mouvement dans le référentiel géocentrique
RG. Ce référentiel étant en translation par rapport à RC galiléen, seule la force d'inertie d'entraînement
€
F
e = - m!
€
a
T/RC est à considérer (pas de force d'inertie de Coriolis puisque
Ω
=
€
0
).
On peut calculer
€
a
T/RC en écrivant la RFD pour la Terre assimilée à son centre T car RT est petit devant
les dimensions de la trajectoire.
MT!
€
a
T/RC = MT[
€
G
L(T) +
€
G
S(T) + …] →
€
a
T/RC = [
€
G
L(T) +
€
G
S(T) + …], que l'on reporte dans
l'expression de la RFD pour M :
m!
€
a
M/RG =
€
F
a + m!
€
G
T(M) + m![
€
G
L(M) -
€
G
L(T) +
€
G
S(M) -
€
G
S(T) + …]

MacXIair:MPSI:Mécanique:Cours M 10 Terrestre ds - 18 juin 2012 page 3 / 4
€
F
a représente les forces vraies et le terme entre crochet, [
€
A
(M) -
€
A
(T)] =
€
C
(M), s'appelle terme
résiduel ou différentiel ou terme de marée → m!
€
a
M/RG =
€
F
a + m!
€
G
T(M) + m!
€
C
(M).
On peut évaluer le terme de marée pour un corps situé au voisinage de la surface de la Terre
(r ≈ RT) : on trouve qu'il est de l'ordre de 10-7!G0 si G0 est le champ gravitationnel de la Terre seule au
voisinage du sol. Donc il est, en général, négligeable devant
€
G
T(M).
On en déduit que m!
€
a
M/RG =
€
F
a + m!
€
G
T(M) et donc que :
⇒ le référentiel géocentrique est galiléen avec une assez bonne approximation,
⇒ il suffit de considérer le champ gravitationnel dû à la Terre.
On pourra dire de même pour tous les référentiels Pcentriques des autres planètes.
II.3. Le problème des marées
On ressent l'incidence du terme de marée quand on s'intéresse aux océans, portion déformable de la
planète.
Calcul de
€
C
(M) =
€
G
L(M) -
€
G
L(T) +
€
G
S(M) -
€
G
S(T) en se limitant aux termes lunaires et solaires et
dans le cas où M et T sont alignés avec L ou S (→ C maximum).
Données : MT = 6!1024 kg ; ML = 7,4!1022 kg ; MS = 2!1030 kg ; TL = 3,84!108 m ; ST = 1,5!1011 m
Gi(T) = G!
€
Mi
P
iT
( )
2
et Gi(M) = G!
€
Mi
P
iT−R
T
( )
2
≈ G!
€
Mi
P
iT
( )
2
![1 + 2!
€
R
T
P
iT
]
→ GL(M) - GL(T) ≈ 2!G!
€
Mi
P
iT
( )
2
!
€
R
T
P
iT
On trouve 10-6 pour la Lune et 5!10-7 pour le Soleil. L'influence de la Lune est prépondérante, mais celle
du Soleil n'est pas négligeable. Donc
II.3.1. Si on ne tient compte que de la Lune,
Elle fait un tour autour de la Terre en 28 jours, donc, sur 24 h, elle est presque fixe et chaque point de la
Terre - océan (qui tourne sur elle même en 24 h) passe deux fois par jour dans l'alignement Terre – Lune donc
se déforme deux fois par jour → deux marées par jour. Si on tient compte de la rotation de la Lune autour de
la Terre, cela donne un décalage de 24 h/28 j = 50 minutes par jour.
II.3.2. Si on tient compte aussi du Soleil
Lorsque T, L et S sont alignés, (nouvelle Lune ou pleine Lune), le Soleil accentue l'effet de la Lune : marées
de vives-eaux.
Lorsque TS est perpendiculaire à TL, (premier et dernier quartier de la Lune), le Soleil déforme l'océan
dans une direction perpendiculaire à l'effet de la Lune, donc il
minimise l'effet de la Lune : ce sont les marées de mortes-eaux.
III. Loi de Newton dans un référentiel lié à la Terre
Cette fois le référentiel est en mouvement de rotation de
vecteur
Ω
dans le référentiel galiléen (le plus proche)
géocentrique.
III.1. Statique dans le référentiel terrestre
Soit un point M de masse m accroché à un fil. A l'équilibre, un
tel système constitue un fil à plomb.
Dans RT, M est immobile et
€
v
RT =
€
0
. La condition d'équilibre
de M dans RT non galiléen doit être écrite en tenant compte de la force d'inertie centrifuge (axifuge)
€
F
e. La
force de Coriolis est nulle puisque la vitesse du mobile est nulle.
M, soumis à la force gravitationnelle que la Terre exerce sur lui : m!
€
G
, et à la tension du fil, est en équilibre
si : m!
€
G
+
€
T
+
€
F
e =
€
0
.
Par définition : le poids d'un corps est égal à la force subie par le fil (à plomb) ; sa direction définit la
verticale du lieu. Donc
€
P
est défini par :
€
P
+
€
T
=
€
0
.
λ
ϕ
θ
r
e
ϕ est
e
θ
sud
e
r
z
y
x

MacXIair:MPSI:Mécanique:Cours M 10 Terrestre ds - 18 juin 2012 page 4 / 4
Ce qui montre que le poids
€
P
= m!
€
G
+
€
F
e = m!
€
G
+ m!Ω2!
€
HM
n'est pas seulement gravitationnel mais
comporte une composante inertielle.
Dans le cas où le terme de marée n'est pas négligeable,
€
P
= m!
€
A
+
F
e = m!
€
A
+ m!Ω2!
€
HM
On définit le champ de pesanteur
€
g
M au point M considéré par
€
P
= m!
€
g
M →
€
g
M =
€
A
+ Ω2!
€
HM
, qui
se résume à
€
A
aux pôles seulement.
On constate donc que le poids n'a pas rigoureusement la direction de
€
G
donc la verticale d'un lieu n'est
pas dirigée vers le centre de la Terre(sauf à l'équateur et aux pôles), mais fait avec TM un petit angle ε qu'on
ne peut pas calculer avec le modèle du champ gravitationnel habituel car l'approximation habituelle (corps
à symétrie sphérique) ne convient pas.
On ne peut que donner les résultats expérimentaux : au pôle g(90) = 9,83 m!s-2, à l'équateur
g(0) = 9,78 m!s-2. L'angle ε est maximum pour une latitude de 45 °, il vaut alors 11 minutes d'angle.
De ce fait, lorsque l'on écrit l'équilibre d'un pendule par
€
P
+
€
T
=
€
0
, dans le référentiel terrestre, on tient
compte du fait que ce référentiel n'est pas galiléen. Par contre, pour un système en mouvement, il manque la
force de Coriolis.
III.2. Dynamique dans le référentiel terrestre
Supposons maintenant le point M mobile au voisinage de O de latitude λ. Sa vitesse dans RT est
€
v
/RT .
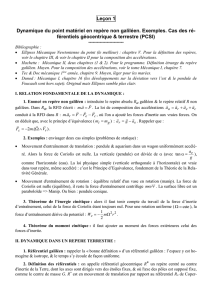
III.2.1. Repère local
Soit le repère local
€
e
x vers l'Est,
€
e
y vers le Nord et
€
e
z verticale ascendante. Le vecteur rotation de la
Terre
Ω
= Ω!cos λ!
€
e
y + Ω!sin λ!
€
e
z.
Pour des déplacements inférieurs au kilomètre, on peut considérer le champ de pesanteur
€
g
= - g!
€
e
z
comme uniforme.
Ici, il faut également prendre en compte la force d'inertie de Coriolis
€
F
C = - 2!m!
Ω
∧
€
v
/RT, la force
d'inertie d'entraînement centrifuge due à la rotation de la Terre étant prise en compte dans le poids de M.
Remarque : la force de Coriolis a pour norme Fc ≤ 2!m!Ω!v. Même avec v = 700 m!s-1 la force de
Coriolis n'atteint pas 1 % du poids.
III.2.2. Effets de la force de Coriolis
• Cas d'un mouvement horizontal
La force
€
F
C = - 2!m!
Ω
∧
€
v
/RT = - 2!m!(Ω!cos λ!
€
e
y + Ω!sin λ!
€
e
z) ∧
€
v
/RT a une première
composante en
€
e
y ∧
€
v
/RT colinéaire à
€
e
z qui représente une modification (infime) du poids, et une
composante en
€
e
z ∧
€
v
/RT horizontale vers la droite de
€
v
/RT .
Application numérique : une voiture de 1 tonne allant à 50 m!s-1 (180 km/h) au pôle (sin λ ≈ 1)
F ≈ 10 N. Ce qui est infime devant le poids de la voiture, et justifie que dans ce cas on considère le référentiel
terrestre comme galiléen.
• Mouvement vertical
Exemple : chute libre sans vitesse initiale.
€
a
=
€
g
- 2!
Ω
∧
€
v
/RT avec
€
g
= - g0!
€
e
z si on néglige les variations de g avec l'altitude.
→
€
˙ ˙
x
= - 2 Ω!(
€
˙
z
!cos λ -
€
˙
y
!sin λ)
€
˙ ˙
y
= - 2 Ω!
€
˙
x
!sin λ
€
˙ ˙
z
= - g0 + 2 Ω!
€
˙
x
!cos λ.
En première approximation, on néglige la perturbation, donc :
€
˙ ˙
x
= 0 →
€
˙
x
= 0 et
€
˙ ˙
y
= 0 →
€
˙
y
= 0,
€
˙ ˙
z
= - g0 →
€
˙
z
= - g0!t, seul
€
˙
z
n'est pas nul, donc le mouvement est dévié vers l'est.
• Autres manifestations observables
⇒ le mouvement des vents
⇒ le sens de rotation autour d'une dépression (cyclones) dépend de l'hémisphère
⇒ l'usure inégale des rails de chemin de fer du fait de la différence de pression des roues (ce ne sont pas
les mêmes voies dans les deux sens de parcours)
⇒ l'expérience du pendule de Foucault, dont le plan d'oscillation fait un tour complet en 31 h 47 min
(celui du Panthéon).
1
/
4
100%