Le contrôle moteur: mieux comprendre les contributions

Le contrôle moteur: mieux comprendre les contributions
musculosquelettique
et neurologique pour améliorer nos
programmes de rééducation motrice.
Laurent Bouyer, Ph.D.
Professeur agrégé
département de réadaptation
Université Laval
Chercheur CIRRIS

Plan de la présentation
1.
Faire une mise à jour sur
notre compréhension du
contrôle moteur.
2.
À l'aide d'exemples, voir
comment optimiser
l’utilisation des
connaissances en
contrôle moteur dans la
pratique clinique, au
« maximum cliniquement
possible ».

Plan de la présentation
1.
Faire une mise à jour sur
notre compréhension du
contrôle moteur.
2.
À l'aide d'exemples, voir
comment optimiser
l’utilisation des
connaissances en
contrôle moteur dans la
pratique clinique, au
« maximum cliniquement
possible ».

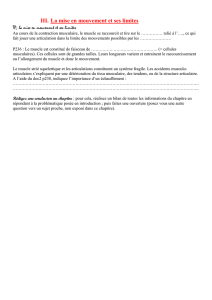
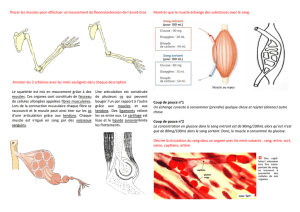
Contrôle moteur:
de quoi parlons-nous?
Contrôle moteur: définition
–
Capacité à régulariser les mécanismes
essentiels au mouvement
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
1
/
51
100%