Polycopié de cours ici. - LAMFA - Université de Picardie Jules Verne

UNIVERSITÉ DE PICARDIE JULES VERNE
Faculté des Sciences
Année universitaire 2011−2012
MASTER — Mention Physique
Mécanique des Milieux Continus
S. DUMONT
Université de Picardie Jules Verne, Faculté des Sciences,
33, rue Saint-Leu, 80039 Amiens Cedex 1, France


Table des matières
1 Description du mouvement d’un milieu continu 5
1.1 Description de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Descriptiond’Euler ............................. 6
1.3 Rapport entre les deux points de vue . . . . . . . . . . . . . . . . . . . . 7
1.4 Etude de la déformation . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Lois de conservation 11
2.1 Conservation de la masse . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Conservation de la quantité de mouvement 15
3.1 Effortsextérieurs .............................. 15
3.2 Effortsintérieurs............................... 16
3.3 Conservation de la quantité de mouvement . . . . . . . . . . . . . . . . 17
3.4 Tenseur des contraintes de Cauchy . . . . . . . . . . . . . . . . . . . . . 17
3.5 Equations d’équilibre . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.6 CerclesdeMohr............................... 20
4 Conservation de la quantité d’énergie 25
4.1 Conservation de l’énergie (premier principe de la thermodynamique) . . . 25
4.2 Deuxième principe de la thermodynamique –
Inégalité de Clausius-Duhem . . . . . . . . . . . . . . . . . . . . . . . . 27
5 Elasticité linéaire 29
5.1 Définition d’un milieu élastique . . . . . . . . . . . . . . . . . . . . . . . 29
5.2 Equations linéarisées . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.3 Conséquences d’une énergie de déformation . . . . . . . . . . . . . . . . 35
5.4 Isotropie, loi de Hooke . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.5 EquationsdeNavier............................. 37
5.6 Equations de compatibilité et de Beltrami . . . . . . . . . . . . . . . . . 38
1

2 TABLE DES MATIÈRES
6 Généralités sur les fluides 41
6.1 Loidecomportement............................ 41
6.2 Statiquedesfluides ............................. 42
6.3 Dynamique des fluides, équation de Navier-Stokes . . . . . . . . . . . . . 44
7 Le principe des puissances virtuelles en mécanique 47
7.1 Analyse pour un système de points matériels . . . . . . . . . . . . . . . . 47
7.2 Application de la méthode des puissances virtuelles en MMC . . . . . . . 50
7.3 Formulation faible des équations de la dynamique . . . . . . . . . . . . . 52
7.4 Théorème de l’énergie cinétique . . . . . . . . . . . . . . . . . . . . . . 52
Bibliographie 53

Chapitre 1
Description du mouvement d’un milieu
continu
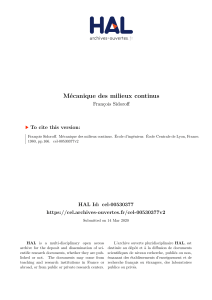
1.1 Description de Lagrange
La configuration du milieu continu Ωtest décrite à l’instant tà partir de sa configuration
d’origine Ω0à l’instant t= 0. En d’autres termes :
−→
x(t) = −→
φ(−→
X , t).
−→
φ(−→
X , t)
−→
e1
−→
e3
−→
e2
Mt
O
t
Ω0Ωt
t=0
−→
X
M0
−→
x(t)
Définition 1. On appellera :
– variables de Lagrange : (X1, X2, X3, t).
– inconnues de Lagrange : φi(X, t), i = 1,2,3.
3
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
1
/
53
100%