TD de Physique no 1 : Mécanique du point

E.N.S. de Cachan Département E.E.A.
M2 FE 3eannée
Physique appliquée 2011-2012
TD de Physique no1 :
Mécanique du point
Exercice no1 : Trajectoire d’un ballon-sonde
-
6
6
-
r
M
6
-
z
~v0
~v
x~ux
~uz
O
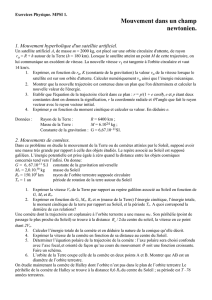
Un ballon-sonde M, lâché au niveau du sol, s’élève avec une vitesse verticale
~v0supposée constante. Le vent lui communique une vitesse horizontale ~v =vx~ux
orientée suivant l’axe (Ox) proportionnelle à son altitude z:vx=z/τ où τ > 0.
À l’instant t= 0, le ballon-sonde est lâché depuis le point O. On note (x(t), z(t))
les coordonnées cartésiennes du point M.
1. En utilisant le vecteur vitesse ~v du ballon, écrire les deux équations
différentielles vérifiées par xet z.
2. En déduire les équations horaires x(t)et z(t)en fonction de v0,τet t.
3. Déterminer l’équation z(x)de la trajectoire suivie par le ballon-sonde au
cours de son ascension. Quelle est la nature de la trajectoire ?
4. Exprimer dans la base cartésienne (~ux, ~uz)le vecteur accélération ~a(t)
du ballon-sonde.
Exercice no2 : Étude de quelques mouvements
1. (Cours) Soit un mobile Mpossédant une trajectoire circulaire de centre Oet de rayon R. Exprimer
les vecteurs vitesse et accélération. Traiter le cas particulier du mouvement uniforme.
2. Un mobile parcourt avec une vitesse constante vla spirale d’équation polaire : r=aθ avec aconstant.
Exprimer en fonction de θet de v, le vecteur vitesse de M.
3. Un mobile Mdécrit dans le plan (Oxy)une spirale suivant les équations horaires polaires suivantes :
r(t) = bexp(−t/τ)
θ(t) = ωt
où b,τet ωsont des constantes positives. Tracer l’allure de la trajectoire de M. Exprimer les vecteurs vitesse
et accélération. Montrer que le vecteur vitesse ~v forme à tout instant un angle αconstant avec le vecteur
position ~r.
Exercice no3 : Vecteur vitesse en coordonnées sphériques
Exprimer le vecteur vitesse d’un mobile Men coordonnées sphériques en utilisant la loi de composition
des vitesses.
ATTENTION : ceci n’est pas applicable au vecteur accélération.
Exercice no4 : Mouvement hélicoïdal
Un point M, repéré par ses coordonnées cartésiennes x,yet zdans le repère (O, ~ex, ~ey, ~ez), a pour trajec-
toire la courbe d’équation paramétrique :
x=Rcos θ,
y=Rsin θ, avec θ≥0
z=hθ.
où Ret hsont des constantes positives. On suppose aussi que le point Mparcourt la courbe dans le sens des
θcroissants, soit ˙
θ > 0.
1

1. Représenter la trajectoire du point Mdans l’espace, ainsi que la projection de cette trajectoire dans
le plan (Oxy).
2. Exprimer le vecteur vitesse ~v de Men fonction de R,θ,het ˙
θ, dans le repère cartésien et dans le
repère cylindrique (O, ~er, ~eθ, ~ez).
3. Montrer que l’angle α= (~ez, ~v)est constant. Donner son expression en fonction de Ret de h.
4. Déterminer l’hodographe du mouvement dans le cas où l’hélice est parcourue à vitesse constante v.
5. Exprimer le rayon de courbure ρau point Mde la trajectoire en fonction de Ret de h.
6. Exprimer l’abscisse curviligne sdu point Men fonction de θ,Ret de h.
Exercice no5 : Course poursuite
6
-x
y
O
A B
CD
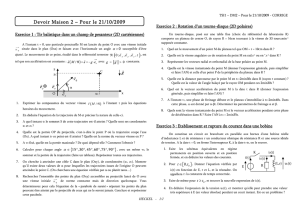
Quatre mouches A,B,Cet Dse trouvent initialement aux quatre
coins d’un carré ABCD de côté acentré sur l’origine du repère O. À partir
de t= 0, chacune court après la suivante (Acourt après B,Baprès C,
. . .) , à la vitesse Vconstante. Pour des raisons de symétrie les mouches
forment à tout instant t≥0un carré. Nous noterons l(t)la longueur d’un
coté du carré formé par les quatre mouches à l’instant t.
1. Établir l’équation différentielle vérifiée par l(t).
2. Au bout de combien de temps les mouches se rencontrent-elles ?
3. Quelle distance Lauront-elles parcourue ?
4. Déterminer la trajectoire de la mouche Aen coordonnées polaires.
Exercice no6 : Échelle double
6
-
B
B
B
B
B
B
B
B
B
r
r
x
y
O
A
B
α
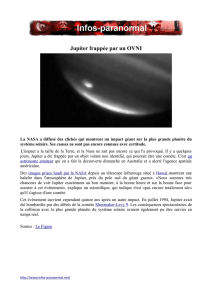
Une échelle double est posée sur le sol, un de ses points d’appui restant
constamment en contact avec le coin Od’un mur. La position de l’échelle à
l’instant test repérée par l’angle α(t)formé par la portion OA de l’échelle avec
le mur. L’extrémité Bde l’échelle glisse sur le sol. L’échelle est telle que OA =
AB =l.
1. Déterminer les composantes des vecteurs vitesse ~vAet accélération ~aA
du point Adans la base polaire (~ur, ~uθ), en fonction de l,α,˙αet ¨α.
2. Exprimer dans la base cartésienne (~ux, ~uy)les composantes des vecteurs
vitesse ~vBet accélération ~aBdu point B, en fonction de l,α,˙αet ¨α.
Exercice no7 : Traversée d’une rivière
-
6
6
?r
r
r-@
@
@I
x
y
O
A
D
M
~v ~
Ve
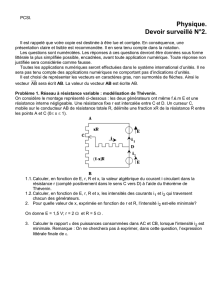
On considère une rivière rectiligne de largeur D. La vi-
tesse du courant est uniforme et vaut ~
Ve, parallèle aux rives.
Un bateau, assimilé à un point M, situé initialement en A, sur
la rive, effectue une traversée de la rivière, en maintenant sa
vitesse ~v, par rapport à l’eau, de norme constante et toujours
dirigée vers le point Oen face de Asur la rive opposée.
1. Exprimer le vecteur vitesse absolue du bateau.
2. En déduire les équations différentielles du mouve-
ment en coordonnées polaires d’origine O. Intégrer ces équa-
tions (cf indication).
3. Tracer l’allure de la trajectoire du bateau dans le cas
où ||~v|| =||~
Ve||
Indication :
d
dxln
1 + cos(x)
sin(x)
=−1
sin(x)
2

Exercice no8 : Système missile-cible -
6
6
?r
r r
r
D
a
x
y
OC
3
M
~v
Une cible Csuit l’axe (0, ~ex)à une vitesse ~
V0=V0~ex. À l’instant t= 0
elle est à l’origine Odu repère. Un missile Mqui part à t= 0 du point D
de coordonnées (0,−a)a une vitesse λV0toujours dirigée par un système
de guidage vers la cible C. On notera xet yles coordonnées de M,r=MC
et θl’angle entre la direction de la vitesse de Met l’horizontale.
1. Exprimer dx
dt et dy
dt en fonction de λ,V0, et θ, puis xet yen fonction
de V0,r,θet t. En déduire deux équations différentielles en r(t)et θ(t).
2. En déduire une équation différentielle en r(θ).
3. Démontrer que
r(θ) = a
sin(θ)tan θ
2λ
en utilisant : Zdx
sin(x)= ln x
2+cste
4. Quelle doit être la condition sur λpour que le missile atteigne la
cible ? Exprimer la durée τde poursuite sachant que :
Zπ
2
0
1
sin2(x)tan x
2λ
dx =λ
λ2−1
Exercice no9 : Déplacement sur une cardioïde
Un mobile décrit une courbe plane dont l’équation en coordonnées polaires est :
r(θ) = r0
2(1 + cos(θ))
où r0est une constante. Cette courbe est appelée "cardioïde", à cause de sa ressemblance avec un coeur. Elle
admet l’axe (O, ~ex)comme axe de symétrie.
1. Tracer succinctement cette courbe.
2. Calculer l’abscisse curviligne en fonction de θ, en prenant comme origine θ= 0,s= 0.
3. Pour quel angle θ0,s=r0.
4. Exprimer la vitesse linéaire en fonction du temps t, de r0et de ω=dθ
dt constant. Puis en fonction de
r,r0et ω.
5. Déterminer les composantes aret aθde l’accélération en fonction du temps tet de ω.
Exercice no10 : Temps de montée et temps de descente
On lance une bille verticalement. Met-elle plus de temps à monter qu’à redescendre ?
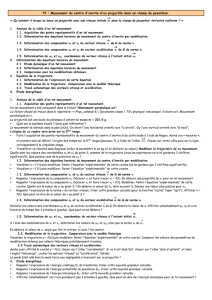
Exercice no11 : Parabole de sureté
-
6
-
6
rxIα
~ex
O
~ey
~v0
y
Àt= 0, un projectile de masse massimilé à un point matériel est
tiré à partir d’un point Oavec une vitesse initiale ~v0. Le dispositif de tir
impose la norme de ~v0mais permet de choisir l’angle αentre l’axe (Ox)
et ~v0(α∈[0,π
2[). Les frottements de l’air sont négligés.
1. Déterminer les équations paramétriques du mouvement et l’équa-
tion de la trajectoire.
2. Préciser les coordonnées du point d’altitude maximale et l’instant
correspondant.
3. On définit la portée comme étant la distance OI avec Ile point de la trajectoire autre que Ovérifiant
y(I) = 0. La calculer.
4. On suppose v0constante mais αvariable. Soit A(X, Y )un objectif à atteindre par le projectile.
Déterminer l’équation de la courbe dans le plan (O, ~ex, ~ey), séparant les points de ce plan pouvant être atteints
par le projectile de ceux qui ne seront jamais atteints (parabole de sureté).
5. Dans le cas où l’objectif Apeut être atteint, monter que deux cas sont possibles :
•un tir atteignant Aavant le point de tangence de la parabole de chute avec la parabole de sureté,
3

•un tir atteignant Aaprès le point de tangence.
6. Dans le premier cas, montrer que ce tir n’est pas toujours direct (c’est à dire objectif atteint avant le
sommet de la parabole de chute) en particulier montrer qu’il existe une ellipse qui délimite la nature du tir
(direct ou indirect). Faire un schéma pour illustrer tous les cas de figure.
Exercice no12 : Viscosimètre à chute de bille
Une bille sphérique, de masse volumique µBet de rayon R, est lâchée sans vitesse initiale dans un fluide
de masse volumique µ. En plus du poids et de la poussée d’Archimède, on tient compte de la force de viscosité
exercée par le fluide sur la bille, opposée au déplacement et de norme :
f= 6πηRv
où ηest la viscosité du fluide et vla norme de la vitesse de la bille. Le champ de pesanteur a pour intensité g.
Le référentiel d’étude est supposé galiléen et la bille est assimilée à un point matériel.
1. Exprimer la vitesse limite ~v∞atteinte par la bille.
On suppose que la bille atteint très rapidement cette vitesse limite. On mesure la durée ∆tnécessaire pour
que la bille parcoure une distance Hdonnée.
2. Déterminer la relation entre ∆t,g,H,R,µB,µ, et η.
3. Montrer que l’expression de la viscosité peut se mettre sous la forme η=K(µB−µ)∆t, en exprimant
la constante d’étalonnage K.
4. La durée de chute de la bille est de 83 s. Calculer la viscosité ηdu fluide. Données : K= 14.10−8m2.s−2,
µB= 7880 kg.m−3,µ= 912 kg.m−3,g= 9,8m.s−2.
Rem : la viscosité s’exprime en Pascal-seconde (P a.s) ou en poiseuille (P l) : 1P a.s = 1 P l = 1 kg.m−1.s−1.
A 20˚C, la viscosité de l’eau est de 10−3P l, celle du glycérol est de 1,49 P l.
Exercice no13 : Prise en compte du frottement de l’air
Àt= 0, un projectile de masse massimilé à un point matériel est tiré à partir d’un point Oavec une
vitesse initiale ~v0formant un angle αavec l’axe (0, ~ex). On tient compte du frottement de l’air, modélisé par
~
F=−k~v avec (k > 0).
1. Trouver les composantes de la vitesse au temps t, et les équations paramétriques du mouvement.
2. Préciser les coordonnées du point d’altitude maximale et l’instant correspondant. Retrouver les ex-
pressions correspondant au cas sans frottement.
3. Montrer que l’on tend vers un mouvement rectiligne uniforme vertical.
Exercice no14 : Ressorts équivalents
Soit deux ressorts de raideur respectives k1et k2, et de longueur à vide l01 et l02.
1. Déterminer le ressort équivalent de ces deux ressorts en parallèle.
2. Déterminer le ressort équivalent de ces deux ressorts en série.
Exercice no15 : Glissement avec frottement
Un petit parallélépipède, assimilable à un point matériel Mde masse m, est
lancé depuis le point origine Od’un plan (Oxy)incliné d’un angle αpar rapport à
l’horizontale, avec un vecteur vitesse initial ~v0dirigé suivant la ligne de plus grande
pente (Ox)et vers le haut. La position du point Mà l’instant test repérée par
son abscisse x(t). On tient compte des forces de frottement. On rappelle que tant
qu’il y a glissement, la composante tangentielle de la force de frottement RT(celle
qui s’oppose au mouvement) est proportionnelle à la composante normale RNde
cette même force, ce que l’on note RT=fRNoù la constante positive fest appelée le coefficient de frottement
dynamique. En outre, une fois que le mobile s’arrête, il reste immobile à condition que l’inégalité RT≤fRN
soit vérifiée.
1. Montrer qu’au début du mouvement, i.e. tant qu’il y a glissement vers le haut, l’accélération ¨xdu
mobile est du type ¨x=−Kg. Exprimer Ken fonction de αet f.
2. Quelle distance dle mobile parcourt-il avant que sa vitesse ne s’annule ?
3. À quelle condition sur l’angle αle mobile s’arrête-t-il définitivement ?
4

Exercice no16 : Coulissement sur une tige en rotation
Une tige τhorizontale passant par Otourne autour de l’axe vertical
(Oz)à la vitesse angulaire constante ω. Un point matériel Mde masse m
peut coulisser sans frottement sur la tige. Il est repéré par ses coordonnées
polaires (r, θ)dans le plan (Oxy). À l’instant t= 0, le point Mest aban-
donné sans vitesse initiale par rapport à la tige à la distance r0de l’origine
O. On suppose de plus qu’à ce même instant, la tige est confondue avec
l’axe (Ox):θ(t= 0) = 0.
1. Déterminer l’équation différentielle du second ordre vérifiée par
r(t).
2. Déterminer la loi horaire r(t)en fonction de r0et ω. Tracer l’allure
de la courbe r(t)pour t≥0.
3. Donner les expressions des composantes dans la base cylindrique de la réaction de la tige.
Exercice no17 : Le palan
Un palan est constitué de 2npoulies et d’un fil disposés comme
indiqué sur le schéma ci-contre. Les axes des poulies supérieures sont
fixes et ceux des poulies inférieures sont liés à une tige AB qui ne
peut se déplacer que verticalement. Les poulies et le fil sont supposés
idéaux. Un opérateur exerce une force ~
Fsur l’extrémité libre du fil.
Déterminer l’accélération de l’objet soulevé, de masse m.
Exercice no18 : Décollement d’une masse
Soit un point O0fixe situé au dessus d’une table à coussin d’air
horizontale. La projection orthogonale de O0sur la table est notée O.
Une masse massimilée à un point matériel est reliée à O0par un ressort de raideur ket de longueur à vide l0.
La distance OO0est l0. La masse peut glisser sans frottement sur la table à coussin d’air.
1. Initialement, la masse est en O. On lui communique une vitesse initiale, V0(horizontale). Quelle
condition doit être vérifiée pour que le ressort puisse décoller la masse du sol. Dans le cas où cette condition
est vérifiée, quelle vitesse initiale minimale doit-on lui imposer pour observer ce décollement.
2. Dans le cas de petits déplacements autour de la position d’équilibre (xl0), déterminer l’équation
différentielle du mouvement. Exprimer la vitesse de la masse en fonction de x.
Exercice no19 : Pendule dont le fil casse
Un pendule simple - masse m, fil de longueur l, inextensible et de masse négligeable - est suspendu en un
point fixe Oet lâché sans vitesse initiale depuis une position où le fil est horizontal et tendu. Il tourne d’un
angle α≥π
2et casse. Soit hla différence d’altitude entre le point Oet le sommet de la trajectoire décrite par
la masse après que le fil ait cassé.
1. Donner qualitativement le domaine de variation de h.
2. Déterminer h.
Exercice no20 : Mouvement d’un point sur un cercle
Un point matériel Mde masse mpeut coulisser sans frottement sur
un cercle de centre Oet de rayon R, placé dans un plan vertical (Oxy)où
(Oz)est orienté suivant la verticale ascendante. Le point Mest attaché
à l’extrémité d’un ressort de longueur à vide l0= 2Ret de constante
de raideur k, dont l’autre extrémité est fixée au point A. Un dispositif
non représenté impose au ressort de rester constamment rectiligne. La
position du point Mest repérée par l’angle θ= ( ~
OB, ~
OM). Le champ de
pesanteur est ~g =−g~uz.
Données : R= 10 cm,m= 100 g,k= 10 N.m−1,g= 10 m.s−2.
1. Déterminer l’expression de la distance AM en fonction de Ret
de θ.
5
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%