Dynamique des systèmes linéaires

Chapitre IX
Dynamique des syst `emes lin ´eaires
IX.a. Généralités sur les systèmes linéaires. L’oscillateur harmonique
IX.a.1. Équations différentielles linéaires.
On va étudier des systèmes linéaires, c.-à-d. des systèmes dont la dynamique est déterminée par une
équation différentielle linéaire dans la variable temps t, ou par un système de telles équations. Le cas le plus
simple est celui d’une équation d’ordre 2,
..
x(t)+A(t).
x(t)+B(t)x(t)=C(t),(1)
où les fonctions A,B,Csont données et indépendantes de la variable dynamique x.
Les théorèmes généraux que nous avons énoncés au chapitre VIII.csur les équations différentielles linéaires
vont nous être utiles dans l’étude de l’équation (1).
IX.a.2. Oscillateur harmonique
On va étudier de façon détaillée le cas où les coefficients Aet Bde l’équation (1) sont positifs et indépendants
du temps. Après changement de notations, on écrit l’équation sous la forme
..
x+1
τ
.
x+ω2
0x=C(t).(2)
On parle d’un oscillateur harmonique amorti et excité. En général, l’oscillateur harmonique et ses généralisa-
tions à plusieurs degrés de liberté sont une bonne façon de décrire la dynamique d’un système au voisinage
d’un point d’équilibre, comme on le verra plus bas.
On est familier avec l’oscillateur harmonique non-amorti et non excité, régi par l’équation
..
x+ω2
0x=0.(3)
Rappelons d’abord l’importance physique et les propriétés majeures de ce cas. Il décrit le mouvement d’un
point matériel soumis à une force de rappel proportionnelle au déplacement par rapport à la position d’équi-
libre :
m..
x=−k x.(4)
Dans le cas d’une force exercée par un ressort, k>0 est la « raideur » du ressort. L’équation différentielle
s’intègre de diverses façons :
•On vérifie aisément que x1(t)=sin(ω0t) et x2(t)=cos(ω0t) sont deux solutions linéairement indépen-
dantes. Une combinaison linéaire λ1sin(ω0t)+λ2cos(ω0t) de ces deux solutions peut se réécrire sous
la forme
x(t)=Asin(ω0t+φ) (5)
en posant λ1=Acos φet λ2=Asin φ. C’est bien la solution générale de (3), avec deux constantes Aet φ
déterminées par les conditions initiales x0et v0: au temps t=0, x(0) =Asin φ=x0,.
x(0) =ω0Acos φ=v0.
La position x(t) oscille avec une amplitude Aet une phase φ※1. La période est 2 π/ω0, la fréquence
est ω0/(2 π). La grandeur ω0=√k/mest appelée selon le contexte pulsation ou fréquence angulaire ;
par abus de langage, on l’appellera aussi parfois fréquence si cela ne risque pas de causer d’ambiguïté.
L’indice 0 sur ω0se refère au cas de l’oscillateur non amorti et non excité.
1. Noter que cette phase φn’a pas ici un sens intrinsèque : elle peut être absorbée dans un changement de l’origine des temps.
105

•On peut aussi intégrer (4) en la multipliant par .
xet en reconnaissant dans ..
x.
xet .
x x les dérivées par
rapport à tde 1
2
.
x2et 1
2x2respectivement. On réécrit donc (4) comme
d
dt1
2m.
x2+1
2k x2=0,(6)
qui s’intègre en 1
2m.
x2+1
2k x2=E=constante.(7)
Ce que cette « constante du mouvement » (ou « intégrale première») de l’équation initiale exprime est
bien sûr la conservation de l’énergie mécanique Edu système, somme de l’énergie cinétique 1
2m.
x2et
de l’énergie potentielle du ressort 1
2k x2.Eest déterminée par les conditions initiales :
E=1
2m v2
0+1
2k x2
0.(8)
On peut réécrire l’équation (7) comme
dx
dt=ω0r2E
k−x2.
Cette équation s’intègre à son tour par changement de variable x=√2E/ksin u, d’où
du
dt=ω0,(9)
donc finalement
x(t)=r2E
ksin(ω0t+φ),
avec une constante d’intégration φ. Le résultat est bien identique à ce qu’on a obtenu plus haut, compte
tenu de ce que E=1
2mω2
0A2=1
2k A2.
Remarques
1. Il y avait un arbitraire de signe dans l’extraction de la racine carrée dans dx/dt=ω0(2 E/k−x2)1/2.
Montrer que le signe opposé aurait conduit à la même expression finale, à une redéfinition de φprès.
2. Les énergies cinétique et potentielle ont pour expressions
Ecin(t)=1
2mω2
0A2cos2(ω0t+φ) et Epot(t)=1
2mω2
0A2sin2(ω0t+φ).(10)
Considérons la moyenne de ces quantités sur un temps long par rapport à leur période (ou sur une
période précisément, ce qui revient au même※2),
hEcin
potiB1
TZT
0
Ecin
pot(t) dt.(11)
Puisque
1
2πZπ
−π
cos2αdα=1
2πZπ
−π
sin2αdα=1
2,
les énergies cinétique et potentielle moyennées sur une période sont égales. Cette équipartition de
l’énergie moyenne entre énergie cinétique et énergie potentielle constitue une des particularités de
l’oscillateur harmonique.
La physique de l’oscillateur harmonique dépasse largement le cas du ressort évoqué plus haut. Considérons
à nouveau l’équation obtenue pour un pendule simple au § VIII.e.1,
m`..
θ=−m g sin θ. (12)
Supposons les oscillations du pendule petites, donc |θ| 1 rad : ceci nous permet de linéariser le problème
en remplaçant sinθpar le premier terme de son développement limité, soit
m`..
θ=−m g θ. (13)
2. Pourquoi ?
106

En posant ω2
0=g/`, on retrouve l’équation (3).
Le pendule simple, dans l’approximation des petites oscillations (|θ| 1 rad) que nous avons faite, a la
propriété remarquable d’isochronisme : la période des oscillations est indépendante de leur amplitude, T=
2πp`/g. Cette propriété n’est vraie que dans l’approximation des petites oscillations, et on doit lui apporter
des corrections dès que l’amplitude croît.
La discussion qui précède s’applique à une classe beaucoup plus large de systèmes mécaniques que le
ressort ou le pendule simple. Considérons un point de masse mse déplaçant sur un axe xet soumis à une
force dérivant d’une énergie potentielle U(x). Supposons que U(x) a un minimum en x=0 et développons
Uau deuxième ordre au voisinage de ce point :
U(x)=U(0) +U0(0) x+1
2U00(0) x2+··· .
Puisque x=0 est un minimum, U0(0) =0 et U00(0) >0. On peut donc poser U00(0) Bmω2
0, soit U(x)≈
U(0) +1
2mω2
0x2. En introduisant ce résultat dans la relation fondamentale de la dynamique, m..
x=−dU/dx,
on retrouve l’équation d’un oscillateur harmonique, avec une pulsation propre ω0donnée par la courbure
U00(0) du potentiel.
Un autre système physique décrit par l’équation (3) est le circuit électrique LC, déjà évoqué au § VIII.a.2,
où nous avions trouvé pour la charge Qune équation du second ordre :
Ld2Q
dt2+Q
C=0.(14)
Cette équation s’identifie avec (4) si on fait les changements de variables Q7→ x,L7→ met 1/C7→ k. La charge
oscille donc selon (5) avec une fréquence ω0=1/√L C . Il en est de même de l’intensité Idu courant ou de
la tension aux bornes du condensateur.
On peut se demander comment prendre en compte la résistance, négligée dans ce qui précède, mais toujours
présente dans un circuit électrique. Son rôle est d’introduire un terme dissipatif dans l’oscillateur harmonique.
C’est ce que nous allons étudier maintenant.
IX.b. Amortissement
IX.b.1. Frottement fluide
On imagine maintenant que le système mécanique étudié est soumis à une force de friction proportionnelle
(et opposée) à sa vitesse. Il s’agit là d’une bonne description du « frottement fluide» auquel est soumis un
corps solide en déplacement à faible vitesse dans un fluide. Par exemple, une sphère de rayon rse déplaçant
dans un fluide subit une force ~
F=−6π η r~
voù ηest la viscosité du fluide (loi de Stokes). D’une façon
générale, il est utile d’écrire cette force de frottement sous la forme −(m/τ)~
v, avec un paramètre τqui a la
dimension d’un temps et qui va fournir une échelle de temps importante dans les phénomènes étudiés par
la suite.
Une autre situation physique décrite par un terme de « frottement fluide» est le circuit RLC, comme on l’a
mentionné plus haut (cf. figure VIII.1b). Une résistance Rintroduit une différence de potentiel supplémentaire
égale à R I, selon la loi d’Ohm, donc l’équation (14) devient
Ld2Q
dt2+RdQ
dt+Q
C=0.(15)
IX.b.2. Oscillateur harmonique amorti
Un oscillateur harmonique sujet à une force de frottement fluide obéit donc à l’équation (2), avec un membre
de droite nul : ..
x+1
τ
.
x+ω2
0x=0.(16)
On va chercher la solution générale de cette équation sous la forme d’une exponentielle x(t)=eαtavec α
éventuellement complexe. La dérivation d’une telle exponentielle revenant à sa multiplication par α, on voit
que (16) est satisfaite à condition que αsoit racine de
α2+1
τα+ω2
0=0,(17)
107

une équation du second degré qui a deux solutions, soit réelles, soit complexes conjuguées. La solution
générale de (16) est une combinaison linéaire des deux exponentielles correspondantes. Les deux cas décrivent
deux situations physiques différentes.
1. Si ω0τ > 1/2, le discriminant de l’équation est négatif et les deux racines sont complexes conjuguées :
α±=1
2τ−1±iq4ω2
0τ2−1.
La solution générale de (16) est de la forme
x(t)=B+exp −t
2τexpit
2τq4ω2
0τ2−1+B−exp −t
2τexp−it
2τq4ω2
0τ2−1
avec deux constantes B+et B−a priori complexes. La solution x(t) devant être réelle, B+et B−doivent
en fait être des nombres complexes conjugués, ce que l’on peut écrire sous la forme
B±=e±i (φ−π/2) A
2,
avec deux nouvelles constantes réelles Aet φà déterminer en fonction des conditions initiales. On
peut alors réécrire
x(t)=Aexp −t
2τsin( ˜
ω0t+φ) (18)
avec
˜
ω0=rω2
0−1
4τ2.(19)
Quand τ→∞,˜
ω0→ω0et on retrouve bien sûr (5). Le mouvement décrit par (18) est un mouvement os-
cillant amorti, avec une pulsation ˜
ω0plus petite que ω0et une amplitude décroissant exponentiellement.
Le régime est dit pseudo-périodique ou sous-amorti.
2. Si ω0τ < 1/2, le discriminant de l’équation est positif et les deux racines α+et α−de (17) sont réelles
et négatives :
α±=1
2τ−1±q1−4ω2
0τ2.
La solution générale de (16) est donc
x(t)=A+exp −t
2τexpt
2τq1−4ω2
0τ2+A−exp −t
2τexp−t
2τq1−4ω2
0τ2,(20)
somme de deux termes s’amortissant exponentiellement mais ne présentant plus de caractère oscillant.
Si A+,0 et si q1−4ω2
0τ2n’est pas petit, le premier terme s’amortit beaucoup moins vite que le
second et domine donc rapidement. Dans tous les cas, l’amortissement fort (1/τ > 2ω0) a supprimé
les oscillations. Ce régime est dit apériodique ou suramorti.
3. Pour être complet, discutons rapidement le cas limite où ω0τ=1/2 : le discriminant s’annule, les deux
racines α±=−1/(2 τ) coïncident et les deux solutions qui leur sont attachées ne sont plus linéairement
indépendantes. On sait toutefois que dans ce cas les fonctions e−t/(2 τ)et te−t/(2 τ)sont deux solutions
linéairement indépendantes. La solution x(t), superposition linéaire de ces deux fonctions, présente
donc à nouveau un amortissement sans oscillations. Le régime est dit critique.
Dans tous les cas, dès que τ > 0, on voit que le système s’amortit, plus ou moins vite, mais inexorablement.
Il est d’usage de définir le temps de relaxation τrcomme le temps au bout duquel les variables x2ou .
x2(ou
encore l’énergie, qui est quadratique en x) ont décru d’un facteur e. Dans les cas d’amortissement faible et
très fort, on trouve que※3
τr=
τsi τ ω0>1
2(sous-amorti),
τ
1−√1−4ω2
0τ2≈1
2ω2
0τsi τ ω01
2(très suramorti).
3. Pour le régime sous-amorti, on ne considère que l’enveloppe des oscillations ; pour le régime très suramorti, on néglige le terme
en facteur de A−.
108

10 20 30 40
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
246 8 10
0.2
0.4
0.6
0.8
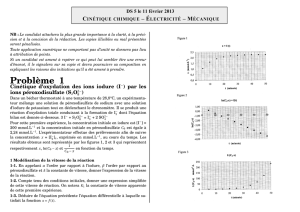
1
Figure IX.1. Régimes sous-amorti et suramorti. On a pris ω0=1, τ=5 dans le premier cas, ω0=1, τ=0,4
dans le deuxième, où on n’a gardé que la première exponentielle de (20).
IX.b.3. Bilan d’énergie, facteur de qualité
IX.b.3.a. Bilan d’énergie
On a vu au § IX.a.2 que, pour un oscillateur non amorti, on avait équipartition de l’énergie entre énergie
cinétique et énergie potentielle. Qu’en est-il en présence d’amortissement ? Pour simplifier le calcul, sup-
posons que les conditions initiales soient telles que A=x0et φ=0 dans (18), et bornons-nous au cas d’un
amortissement faible, ω0τ1/2. Dans la solution (18), on a donc ˜
ω0≈ω0. On calcule alors
.
x(t)=x0exp −t
2τ˜
ω0cos[ ˜
ω0t]−1
2τsin[ ˜
ω0t].
Dans le calcul des moyennes de x2(t) et de .
x2(t) sur une période apparaissent des termes e−t/τ cos2(˜
ω0t), etc.
Mais puisqu’on a supposé ω01/(2 τ), l’exponentielle e−t/τ varie très peu sur une période, et on peut la
sortir de l’intégrale. On se ramène de la sorte aux intégrales déjà considérées et on calcule aisément
hEcin(t)i ≈ m x2
0
41
4τ2+ω2
0e−t/τ ≈1
4mω2
0x2
0e−t/τ,(21)
hEpot(t)i=1
2mω2
0he−t/τ sin2(˜
ω0t)i ≈ 1
4mω2
0x2
0e−t/τ.(22)
On note que si on a bien encore (dans cette approximation) équipartition entre énergie cinétique et énergie
potentielle, leur somme E(t)=Ecin(t)+Epot(t) dépend du temps : l’énergie du système n’est plus conservée
mais dissipée en raison de l’amortissement. La puissance dissipée Pest elle-même fonction du temps
P(t)B−d
dthE(t)i=1
2τmω2
0x2
0e−t/τ=hE(t)i
τ.
On vérifie que cette énergie dissipée est égale (au signe près) au travail de la force de frottement. Sur une
période,
Wfrott =Zt+T
t0=t−m
τvvdt0=−2
τZt+T
t0=t
m v2
2dt0=−T
τhEi=−T P(t).
IX.b.3.b. Facteur de qualité
Le facteur de qualité d’un système oscillant sujet à un amortissement est
QB2πénergie emmagasinée
énergie dissipée par période .(23)
Qest donc une mesure de l’amortissement, une valeur élevée de Qsignalant un amortissement faible. Ici
nous avons
Q=2πE
P×2π/ ˜
ω0
=E˜
ω0
P≈ω0τ.
(Dans l’approximation d’amortissement faible que nous avons faite, Ene varie pas de façon appréciable sur
une période.) Noter que Qest aussi 2 πfois le nombre d’oscillations pendant le temps de relaxation τr=τ.
Pour fixer les idées, voici quelques valeurs typiques de Q:
•Terre (ondes sismiques) : Q≈250–1500 ;
•corde de piano ou de violon : Q≈104;
•atome excité : Q≈107.
109
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%