Table des mati`eres - Physiqueprepa.webnode.fr

c
S.Boukaddid Changement de r´ef´erentiel sup TSI
Dynamique dans un r´ef´erentiel non galil´een
Table des mati`eres
1G´en´eralit´e 2
2Etude cin´ematique 3
2.1 Vecteur rotation d’entraˆınement ...................... 3
2.2 Relation fondamentale de la d´erivation .................. 4
2.3 Composition des vitesses .......................... 5
2.4 Composition des acc´el´erations ....................... 6
3Dynamique dans un r´ef´erentiel non galil´een 8
3.1 Principe de la relativit´e galil´een ...................... 8
3.2 Lois de la dynamique dans un r´ef´erentiel non galil´een .......... 9
3.2.1 Principe fondamental de la dynamique en r´ef´erentiel non galil´een 9
3.3 Th´eor`eme du moment cin´etique en r´ef´erentiel non galil´een ....... 10
3.4 Th´eor`eme de l’´energie cin´etique dans un r´ef´erentiel non galil´een . . . . 10
3.5 Energie m´ecanique d’un point mat´eriel dans un r´ef´erentiel non galil´een R’ 11
3.5.1 Energie potentielle d’entraˆınement centrifuge ........... 11
3.5.2 Th´eor`eme de l’´energie m´ecanique ................. 11
4Application : Poids d’un point mat´eriel 12
4.1 R´ef´erentiel g´eocentrique-R´ef´erentiel terrestre ............... 12
4.2 Champ gravitationnel ............................ 13
4.3 Poids d’un corps .............................. 13
1 / 14

c
S.Boukaddid Changement de r´ef´erentiel sup TSI
1G´en´eralit´e
•R(O, x, y, z, t) : r´ef´erentiel galil´een
fixe
•R0(O0, x0, y0, z0, t0) : r´ef´erentiel en mou-
vement par rapport `a R
O
x
y
z
O’
x’
y’
z’
•le rep`ere R,fixe dit rep`ere absolu
•le mouvement d’un point mat´eriel M par rapport `a R est qualifi´e du mouvement
absolu
•le rep`ere R0, en mouvement dit rep`ere relatif
•le mouvement d’un point mat´eriel M par rapport `a R’ est qualifi´e du mouvement
relatif
IEn m´ecanique classique non relativiste (v << C) le temps est absolu ,c`ad,
ne d´epend pas du r´ef´erentiel donc t=t0.
IOn distingue entre les mouvements relatifs suivants :
•translation : les axes de R0restent parall`ele `a ceux de Rdonc les vecteurs
de base de R0restent invariables au cours du temps
−→
ex=−→
ex0;−→
ey=−→
ey0;−→
ez=−→
ez0
On distingue entre deux types :
•translation rectiligne : L’origine O0de R0d´ecrit une courbe rectiligne
OO’ O’ (C)
•translation circulaire : l’origine O0de R0d´ecrit un cercle
OO’
R’
R’
R’
R’
Imouvement de rotation
2 / 14

c
S.Boukaddid Changement de r´ef´erentiel sup TSI
2Etude cin´ematique
2.1 Vecteur rotation d’entraˆınement
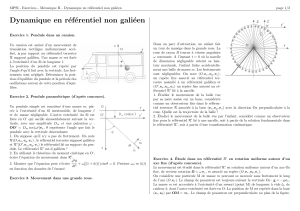
Consid´erons deux r´ef´erentiels
•un r´ef´erentiel R(O, −→
ex,−→
ey,−→
ez)
•un r´ef´erentiel R0(O0,−→
ex0,−→
ey0,−→
ez0) en mouvement par rapport `a R
•D´efinition 1 : On appelle mouvement d’entrainement, le mouvement du r´ef´erentiel
R0par rapport `a R
•le mouvement g´en´eral de R0par rapport `a Rse d´ecompose en :
Iun mouvement de translation par rapport `a Rcaract´eris´e par le vecteur
vitesse −→
v(O0/R) = d−−→
OO0
dt !R
Imouvement de rotation par rapport `a Rcaract´eris´e par le vecteur rotation
d’entrainement −→
ω(R0/R)
•D´efinition 2 : le vecteur rotation d’entrainement −→
ω(R0/R) d’un r´ef´erentiel
R0(O0,−→
ex0,−→
ey0,−→
ez0) par rapport au r´ef´erentie R(O, −→
ex,−→
ey,−→
ez) caract´erise la ro-
tation de R0par rapport `a Rtel que :
Id−→
ex0
dt R
=−→
ω(R0/R)∧−→
ex0
Id−→
ey0
dt R
=−→
ω(R0/R)∧−→
ey0
Id−→
ez0
dt R
=−→
ω(R0/R)∧−→
ez0
•Exemple
IR(O, −→
ex,−→
ey,−→
ez) : rep`ere absolu
IR0(O, −→
er,−→
eθ,−→
ez) : rep`ere relatif
x
y
−→
ex
−→
ey
−→
eθ
−→
erθ
−→
ez
I−→
eret −→
eθsont des vecteurs li´es `a R’ donc sont fixes dans R’ donc
d−→
er
dt R0
=d−→
eθ
dt R0
=−→
0
Id−→
er
dt R
=˙
θ−→
eθavec −→
eθ=−→
ez∧−→
erdonc
d−→
er
dt R
=˙
θ−→
ez∧−→
er
3 / 14

c
S.Boukaddid Changement de r´ef´erentiel sup TSI
Id−→
eθ
dt R
=−˙
θ−→
eravec −→
er=−−→
ez∧−→
eθdonc
d−→
eθ
dt R
=˙
θ−→
ez∧−→
eθ
Ile vecteur rotation d’entraˆınement est
−→
ω(R0/R) = ˙
θ−→
ez
d−→
er
dt R
=−→
ω(R0/R)∧−→
eret d−→
eθ
dt R
=−→
ω(R0/R)∧−→
eθ
•Propri´et´es
I−→
ω(R0/R) est port´e par l’axe de rotation
I−→
ω(R0/R) = −−→
ω(R/R0)
I−→
ω(R1/R3) = −→
ω(R1/R2) + −→
ω(R2/R3) : relation de Chˆales
2.2 Relation fondamentale de la d´erivation
•R(O, −→
ex,−→
ey,−→
ez) rep`ere absolu
•R0(O0,−→
ex0,−→
ey0,−→
ez0) rep`ere relatif
•−→
ω(R0/R) : vecteur rotation d’en-
traˆınement de R0par rapport `a R
•−→
U=Ux0−→
ex0+Uy0−→
ey0+Uz0−→
ez0: vec-
teur libre non li´ee `a R0
O
x
y
z
O’
x’
y’
z’ −→
U
I d−→
U
dt !R0
=dUx0
dt
−→
ex0+dUy0
dt
−→
ey0+dUz0
dt
−→
ez0
I d−→
U
dt !R
=dUx0
dt
−→
ex0+dUy0
dt
−→
ey0+dUz0
dt
−→
ez0+Ux0d−→
ex0
dt R
+Uy0d−→
ey0
dt R
+
Uz0d−→
ez0
dt R
I
d−→
ex0
dt R
=−→
ω(R0/R)∧−→
ex0
d−→
ey0
dt R
=−→
ω(R0/R)∧−→
ey0
d−→
ez0
dt R
=−→
ω(R0/R)∧−→
ez0
Ion obtient la relation fondamentale de la d´erivation
4 / 14

c
S.Boukaddid Changement de r´ef´erentiel sup TSI
d−→
U
dt !R
= d−→
U
dt !R0
+−→
ω(R0/R)∧−→
U
ICas particulier
•si −→
Uest li´e `a R0on retrouve :
d−→
U
dt !R
=−→
ω(R0/R)∧−→
U
•pour le mouvement de translation −→
ω(R0/R) = −→
0 on trouve
d−→
U
dt !R
= d−→
U
dt !R0
la d´erivation ne d´epend pas du r´ef´erentiel
2.3 Composition des vitesses
•R(O, −→
ex,−→
ey,−→
ez) rep`ere absolu
•R0(O0,−→
ex0,−→
ey0,−→
ez0) rep`ere relatif
•−→
ω(R0/R) : vecteur rotation d’en-
traˆınement de R0par rapport `a R
•Mun point mobile dans R0
•−−→
OM =x−→
ex+y−→
ey+z−→
ez
•−−→
O0M=x0−→
ex0+y0−→
ey0+z0−→
ez0
O
x
y
z
O’
x’
y’
z’ M
•vitesse relative −→
vr: C’est la vitesse du point Mdans le r´ef´erentiel relatif R0:
−→
vr(M) = −→
v(M/R0) = ˙
x0−→
ex0+˙
y0−→
ey0+˙
z0−→
ez0
•vitesse absolue −→
va: C’est la vitesse du point Mdans le r´ef´erentiel absolu R:
−→
va(M) = −→
v(M/R) = ˙x−→
ex+ ˙y−→
ey+ ˙z−→
ez
I−−→
OM =−−→
OO0+−−→
O0M
I−→
V(M/R) = d−−→
OM
dt !R
=d
dt −−→
OO0+−−→
O0MR= d−−→
OO0
dt !R
+ d−−→
O0M
dt !R
I−→
V(M/R) = −→
V(O0/R)+ d−−→
O0M
dt !R0
+−→
ω(R0/R)∧−−→
O0M=−→
V(M/R0)+−→
Ve(M/R)
•vitesse relative −→
Vr=−→
V(M/R0) = d−−→
O0M
dt !R0
•vitesse d’entrainement : −→
Ve=−→
V(O0/R) + −→
ω(R0/R)∧−−→
O0M
5 / 14
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%