cinematique du solide ? mouvements simples

Cinématique II –Cinématique du solide – Mouvements simples - p.1
CINEMATIQUE DU SOLIDE – MOUVEMENTS SIMPLES
I – Introduction
Une chaîne fonctionnelle est commandée pour satisfaire une fonction de service. L'actionneur va
mettre en mouvement les pièces de la chaîne de solides. Les impératifs liés aux technologies utilisées
conduisent à choisir des lois de mouvement. Ces lois seront des compromis entre les performances
optimales et les limites technologiques.
Dans tous les cas, l'étude cinématique au cours du temps d'une chaîne de solides nécessite la
connaissance des caractéristiques des mouvements des différents solides qui la composent. Ces
caractéristiques correspondent aux trajectoires de certains points, à la vitesse et à l'accélération de
points appartenant aux solides. On définit un espace-temps (dimension 1) dont les points sont les
instants t.
II – Quelques rappels de cinématique du point
1. Vecteur position
On peut toujours exprimer le vecteur position d'un point M par ses trois coordonnées dans un des
systèmes usuels de coordonnées : M(x,y,z), M(r,θ,z) ou M(r,θ, ϕ).
Dans une chaîne de solides, un point sera facilement repéré en utilisant les différentes grandeurs
liées au mécanisme : dimensions, position et orientation des solides. On cherchera toujours a
exprimer le vecteur position de la manière la plus simple en utilisant ces données.
Exemple : Système de distribution de barres, module de chargement
Ainsi la position du point C du manipulateur sera naturellement définie par le vecteur position
suivant :
z y x AC
321
λ+λ+λ=
Remarques :
# Les grandeurs λ
1
, λ
2
et λ
3
sont les trois paramètres associés aux liaisons glissières. Ils sont
variables au cours du temps, une notation rigoureuse serait : λ
1
(t)…

Cinématique II –Cinématique du solide – Mouvements simples - p.2
# Comme pour établir les figures de changement de base associées aux paramètres angulaires,
pour le paramètre linéaire λ
3
il est souhaitable de le considérer comme un scalaire, sur la figure il est
négatif.
Comme dans cet exemple ce paramètre sera toujours négatif, il est possible de le considérer en
valeur absolue, et intégrer le signe dans l'expression vectorielle ainsi :
z BC
3
λ−=
avec λ
3
> 0.
Mais en procédant ainsi Il faudra toujours être extrêmement prudent.
Exemple : Système de distribution de barres, support mobile
La position du point D du support mobile sera définie par le vecteur position suivant :
44
y dDO =
. C'est bien l'expression la plus simple de ce vecteur position. Il serait bien sûr possible
d'exprimer ce vecteur dans la base (x, y, z), mais cela compliquerait les expressions inutilement. Le
repère lié au solide 4 est appelé "repère d'expression".
Remarques : cette fois d est une constante, c'est le vecteur y
4
(t) qui dépend du temps.
2. Vitesse linéaire d'un point
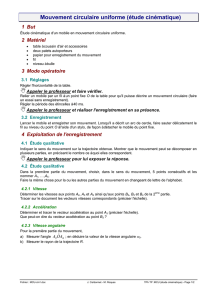
2.1. Définition du vecteur vitesse
Soient
)t(OM
et
)'t('OM
les
vecteurs position de M aux instants t
et t', tels que t'>t. Le vecteur vitesse
de M caractérise la variation du
vecteur position
)t(OM
par rapport
au temps.
R/dt )t(OMd
)R/M(V =
C'est la dérivée absolue par
rapport au temps du vecteur
position.
OM
'OM
V(M/R)
x
O
M
y
z
M'
..

Cinématique II –Cinématique du solide – Mouvements simples - p.3
Remarque : posons
OM'OM'MM −=
, en revenant à la définition de la dérivation d'un vecteur par
rapport au temps, on trouve :
R/dt )t(OMd
]
dt )t(OM )t('OM
[lim ]
t't 'MM
[lim 'tt'tt =
−
=
−→→
2.2. Caractéristiques du vecteur vitesse
# A tout instant le vecteur vitesse de M est tangent à la trajectoire du point M.
# Sens : le vecteur vitesse de M est orienté dans le même sens que
'
MM
, donc dans le sens du
mouvement.
# Unité : C'est le rapport d'une longueur par un temps : m.s
-1
.
3. Accélération linéaire d'un point
3.1. Définition du vecteur accélération
# C'est un vecteur qui exprime la
variation instantanée du vecteur
vitesse. Cette variation peut-être en
norme ET en direction.
La définition du vecteur
accélération est :
R/dt )]R/M(V[ d
)R/M(
r
r=Γ
z
V(M/R)
x
O
M
y
M'
..
V(M'/R)
3.2. Caractéristiques du vecteur accélération
# Unité, c'est le rapport d'une variation de vitesse par un temps : m.s
-2
.
# Notations : les notations usuelles sont
)R/M(Γ
dans l'espace, γ(M/R) pour une accélération
suivant un axe. On trouve également
)R/M(a
.
II – Exemples de mouvement de solides : Système de distribution de barres
1. Module de chargement
# Analyse des mouvements : constituée de trois liaisons glissières, la chaîne de solides met
en évidence des mouvements de translation :
Les mouvements [1/0], [2/1], [3/2] sont tous des mouvements de translation faisant intervenir un
paramètre linéaire :

Cinématique II –Cinématique du solide – Mouvements simples - p.4
[1/0] : translation suivant l'axe x, repérée par le paramètre λ
1
;
[2/1] : translation suivant l'axe y, repérée par le paramètre λ
2
;
[3/2] : translation suivant l'axe z, repérée par le paramètre λ
3
;
Si on considère le mouvement de [3/0], on constate qu'il s'agit d'une combinaison des trois
translations définies ci-dessus.
# Expression d'une vitesse d'un point : soit C point considéré lié au bras 3, alors sa
vitesse linéaire absolue (par rapport au référentiel d'observation fixe), par rapport au bâti 0 s'obtient
en dérivant le vecteur position.
Repère d'observation fixe : R(A, x, y, z)
z y x
R/dt )z y x (d
R/dt )t(AC d
)0/3C(V)0/3,C(V
321
321
λλλ
λλλ
&&& ++=
++
==∈=
Remarques : la dérivation du vecteur est élémentaire, car les vecteurs de la base sont fixes.
# Expression d'une accélération d'un point :
z y x
R/dt )z y x (d
R/dt )0/3C(V d
)0/3C()0/3,C(
321
321
λλλ
λλλ
&&&&&&
&&& ++=
++
=
∈
=∈Γ=Γ
2. Support mobile 4
Le support mobile est en mouvement de
rotation autour d'un axe fixe, car en liaison
pivot par rapport au bâti. Ainsi le point D a une
trajectoire circulaire : sa vitesse est tangente
au cercle.
R/dty d
d
R/dt DO d
)0/4,D(V 44 ==
Il reste donc à exprimer la dérivée du vecteur
y
4
, vecteur de la base mobile en rotation autour
de l'axe x.
Parenthèse mathématique :
4
4
4
4
z )t(
R
/
dt
)t(y d
z )t(cos)t(y )t(sin)t(
R/dt )t(y d
z )t(siny )t(cos)t(y
α=
αα+αα−=
α+α=
&
&&
α
z
4
y
z
α
x, x
4
y
4

Cinématique II –Cinématique du solide – Mouvements simples - p.5
Remarques :
# Ce résultat est à connaître, il sera utilisé sans être redémontré.
# De la même manière on trouverait :
4
4
y )t(
R/dt )t(z d
α
&
−=
Expression de la vitesse :
4
4z (t) d
R/dt DO d
)0/4,D(V α== &
C'est bien la vitesse du point D lié
au solide 4, dans son mouvement par rapport au bâti 0. Son expression (la plus simple) est dans R
4
.
)t(
dtt)( d
)0/4( α=
α
=ω &
est la vitesse angulaire de 4 par rapport à 0, exprimée en rad.s
-1
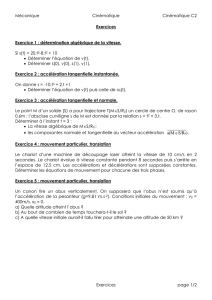
On constate que la norme du vecteur
vitesse ainsi obtenu est proportionnelle à
l'éloignement de l'axe de rotation.
Cette remarque permet de représenter
une image du champ des vitesses
linéaires du solide 4, dans son
mouvement par rapport au bâti 0, pour
l'ensemble des points situés sur le segment
O
4
D.
La figure ci-contre montre l'image de ce
champ des vitesses.
Conclusion : c'est le champ des vitesses linéaires qu'on souhaite connaître afin de caractériser les
mouvements des solides, et ce pour des mouvements complexes. Comme on a pu le dire dans le
premier chapitre, c'est la particularité du modèle de solide indéformable qui va permettre de
caractériser ce champ des vitesses, avec la mise en place du torseur cinématique.
3. Loi de mouvement, lois horaires
3.1. Définition des équations horaires
Quel que soit le repère choisi, les coordonnées, ou paramètres de position, d'un mobile sont des
fonctions du temps t, Ces fonctions sont les équations paramétriques, de paramètre t, de la position
du mobile. Le paramètre étant le temps, elles sont de ce fait aussi appelées "Equations horaires" :
- En coordonnées cartésiennes : x = x(t) ; y = y(t) ; z = z(t)
- En coordonnées cylindriques : r = r(t) ; θ = θ(t) ; z = z(t)
- En coordonnées sphériques : r = r(t) ; θ = θ(t) ; ψ = ψ(t)
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%