Adéquation Algorithme Architecture pour la

Ad´equation Algorithme Architecture pour la
reconstruction 3D en imagerie m´edicale TEP
Th`ese de l’INP Grenoble pr´epar´ee au laboratoire Gipsa-lab
sous la direction de Michel DESVIGNES et de St´ephane MANCINI
Nicolas GAC
S´eminaire CEA - 6 novembre 2008

2/55
Acc´el´eration de la reconstruction 3D
Ad´equation Algorithme Architecture
Performances de l’architecture 3P
Vers une reconstruction de meilleure qualit´e
1Acc´el´eration de la reconstruction 3D en imagerie m´edicale TEP
Imagerie m´edicale TEP
Acc´el´eration mat´erielle
2Ad´equation Algorithme Architecture
Strat´egie d’acc`es m´emoire
Architecture 3P : Pipelin´ee, Pr´efetch´ee et Parall´elis´ee
3Performances de l’architecture 3P
Protocole de mesure
Qualit´e et efficacit´e de reconstruction
Etude comparative sur CPU/GPU/FPGA
4Vers une reconstruction de meilleure qualit´e
5Conclusion et Perspectives + Projet TOMOX
2/55

3/55
Acc´el´eration de la reconstruction 3D
Ad´equation Algorithme Architecture
Performances de l’architecture 3P
Vers une reconstruction de meilleure qualit´e
Imagerie m´edicale TEP
Acc´el´eration mat´erielle
1Acc´el´eration de la reconstruction 3D en imagerie m´edicale TEP
Imagerie m´edicale TEP
Acc´el´eration mat´erielle
2Ad´equation Algorithme Architecture
3Performances de l’architecture 3P
4Vers une reconstruction de meilleure qualit´e
5Conclusion et Perspectives + Projet TOMOX
3/55

4/55
Acc´el´eration de la reconstruction 3D
Ad´equation Algorithme Architecture
Performances de l’architecture 3P
Vers une reconstruction de meilleure qualit´e
Imagerie m´edicale TEP
Acc´el´eration mat´erielle
Projet ArchiTEP
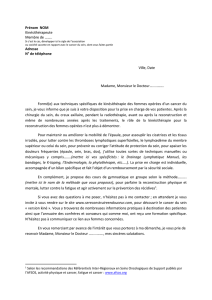
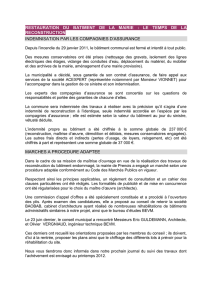
Tomographie `a Emission de Positons (TEP)
Imagerie fonctionnelle in vivo
Temps de reconstruction importants
γ
γ
511 Kev
511 Kev
(Sinogrammes)
1
Visualisation
5Reconstruction
4
2Acquisition
3
Injection du traceur
Enregistrement des données
4/55

 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
1
/
85
100%