Les forces fictives - Olivier Castéra

LES FORCES FICTIVES
OLIVIER CAST´
ERA
R´
esum´
e. Les forces d’inertie d’entraˆınement et de Coriolis sont
des forces fictives, elles n’apparaissent que dans des r´ef´erentiels
non inertiels.
Table des mati`
eres
1. Vitesse dans un r´ef´erentiel non inertiel 1
2. Acc´el´eration dans un r´ef´erentiel non inertiel 6
3. Forces dans un r´ef´erentiel non inertiel 8
4. Exemple de force fictive : la force centrifuge 9
4.1. Dans le r´ef´erentiel inertiel 10
4.2. Dans le r´ef´erentiel non inertiel 10
5. Annexe 10
1. Vitesse dans un r´
ef´
erentiel non inertiel
D´efinition 1.1. R´ef´erentiel d’inertie
Rest un r´ef´erentiel (une r´ef´erence dans l’espace et le temps) d’inertie, si
et seulement si ce r´ef´erentiel se d´eplace d’un mouvement de translation
(il n’a aucun mouvement de rotation par rapport au reste de l’univers)
rectiligne (il ne subit pas de force normale) et uniforme (il ne subit pas
de force tangentielle).
Soit donc R(O, i,j) un r´ef´erentiel d’inertie, et soit R′(O′,i′,j′) un
r´ef´erentiel non inertiel se d´epla¸cant par rapport `a R`a la vitesse non
constante V(t) et tournant autour de son axe O′z′`a la vitesse angulaire
non constante ω(t).
D´efinition 1.2. Rayons vecteurs
Les rayons vecteurs OM et O′Mdu corps (M) dans chacun des
r´ef´erentiels Ret R′ont pour expressions respectives :
OM =xi+yj+zk
O′M=x′i′+y′j′+z′k′
On se place dans le domaine non relativiste :
Date: 2 avril 2017.
1

2 OLIVIER CAST ´
ERA
D´efinition 1.3. Temps
Le temps absolu, vrai et math´ematique, sans relation `a rien d’ext´erieur,
s’´ecoule uniform´ement et s’appelle dur´ee.
Par cons´equent, le temps s’´ecoule de la mˆeme fa¸con dans les r´ef´erentiels
Ret R′,
t=t′
de sorte que les d´erivations par rapport `a tet `a t′soient ´equivalentes.
Notation. La d´eriv´ee par rapport au temps d’un vecteur sera not´ee dR
t
pour un observateur fixe dans le r´ef´erentiel R, et dR′
tpour un observa-
teur fixe dans le r´ef´erentiel R′.
Th´eor`eme 1.1. Par changement de r´ef´erentiel, les vecteurs vitesses
du corps (M)sont li´es par la relation suivante,
v=V+v′+ω×O′M(1)
appel´ee loi de composition des vitesses, dans laquelle vest la vitesse ab-
solue, Vest la vitesse relative des r´ef´erentiels, v′est la vitesse relative,
et ωest la vitesse angulaire relative de R′par rapport `a R.
D´emonstration. D´erivons dans Rpar rapport `a tl’´egalit´e vectorielle :
OM =OO′+O′M
dR
tOM =dR
tOO′+dR
tO′M
D´efinition 1.4. Vitesse absolue
La vitesse absolue vdu corps (M) dans le r´ef´erentiel Ra pour expres-
sion :
v∆
=dR
tOM
=dR
t(xi+yj+zk)
= ˙xi+ ˙yj+ ˙zk
D´efinition 1.5. Vitesse relative des r´ef´erentiels
La vitesse relative du r´ef´erentiel R′vu de Ra pour expression :
V∆
=dR
tOO′
=dR
t(xO′i+yO′j+zO′k)
= ˙xO′i+ ˙yO′j+ ˙zO′k
La vitesse relative du r´ef´erentiel Rvu de R′a pour expression :
V′∆
=dR′
tO′O
=dR′
t(x′
Oi′+y′
Oj′+z′
Ok′)
= ˙x′
Oi′+ ˙y′
Oj′+ ˙z′
Ok′

LES FORCES FICTIVES 3
En g´en´eral, V6=V′. En effet, supposons que vu de R, le r´ef´erentiel
R′ne fasse que tourner sur lui-mˆeme. Alors, vu de R′, le r´ef´erentiel R
d´ecrit un cercle autour de R′. Leurs vitesses relatives respectives sont
donc diff´erentes. En se servant de ces d´efinitions, nous avons :
v=V+dR
tO′M(2)
Vu du r´ef´erentiel R, les vecteurs de base du r´ef´erentiel R′varient dans
le temps. Le dernier terme du membre de droite a pour expression :
dR
tO′M=dR
t(x′i′+y′j′+z′k′)
= ˙x′i′+ ˙y′j′+ ˙z′k′+x′dR
ti′+y′dR
tj′+z′dR
tk′
D´efinition 1.6. Vitesse relative
La vitesse relative v′du corps (M) dans le r´ef´erentiel R′a pour expres-
sion :
v′∆
=dR′
tO′M
=dR′
t(x′i′+y′j′+z′k′)
= ˙x′i′+ ˙y′j′+ ˙z′k′
Avec cette d´efinition :
dR
tO′M=v′+x′dR
ti′+y′dR
tj′+z′dR
tk′(3)
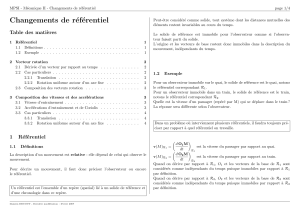
On suppose que les axes Oz et O′z′ont mˆeme direction et mˆeme sens,
de sorte que ket k′soient ´equipollents. Appelons α(t) l’angle orient´e
de Rvers R′, qui est l’angle de rotation de R′dans R`a l’instant t.
~
i
~
j
~
i′
~
j′
α
α
~
k′
~
k
Nous avons les relations :
i′= cos αi+ sin αj
j′=−sin αi+ cos αj
k′=k
(4)

4 OLIVIER CAST ´
ERA
dR
ti′=−˙αsin αi+ ˙αcos αj
= ˙αj′
dR
tj′=−˙αcos αi−˙αsin αj
=−˙αi′
dR
tk′=dR
tk
=0
(5)
par cons´equent, la relation (3) s’´ecrit :
dR
tO′M=v′+x′˙αj′−y′˙αi′
=v′+ ˙α(x′j′−y′i′) (6)
D´efinition 1.7. Vecteur vitesse angulaire relative
Le vecteur vitesse angulaire de R′par rapport `a Ra pour expression :
ω∆
=dR
tαk
= ˙αk
Appelons α′(t) l’angle orient´e de R′vers R, qui est l’angle de rotation
de Rdans R′`a l’instant t, et tel que α′=−α. Le vecteur vitesse
angulaire de Rpar rapport `a R′a pour expression :
ω′∆
=dR′
tα′k′
= ˙α′k′
=−˙αk
Le dernier terme du membre de droite de (6) est le produit vectoriel
ω×O′M. En effet,
ω×O′M=
0
0
˙α
×
x′
y′
z′
=
0×z′−˙αy′
˙αx′−0×z′
0×y′−0×x′
=
−˙αy′
˙αx′
0
= ˙α(x′j′−y′i′)
si bien que la relation (3) s’´ecrit :
dR
tO′M=dR′
tO′M+ω×O′M(7)
=v′+ω×O′M(8)

LES FORCES FICTIVES 5
Avec ce r´esultat, la loi de composition des vitesses (2) s’´ecrit :
v=V+v′+ω×O′M
Remarque. On peut obtenir ce r´esultat en utilisant une d´emonstration
purement alg´ebrique :
i′·i′= 1
dR
t(i′·i′) = 0
i′·dR
ti′+dR
ti′·i′= 0
2i′·dR
ti′= 0
dR
ti′⊥i′
dR
ti′=ω×i′
o`u ωest un vecteur pour l’instant ind´etermin´e.
i′·j′= 0
dR
t(i′·j′) = 0
i′·dR
tj′+j′·dR
ti′= 0
i′·dR
tj′=−j′·(ω×i′)
En utilisant le th´eor`eme 5.1 donn´e en annexe :
i′·dR
tj′=−i′·(j′×ω)
=i′·(ω×j′)
dR
tj′=ω×j′
De mˆeme pour le vecteur k:
i′·k′= 0
dR
tk′=ω×k′
En posant k′comme axe de rotation,
dR
tk′=0
ω×k′=0
soit,
ω=ωk′
En appliquant ces r´esultats `a la relation (3), puis `a la relation (2), nous
obtenons la loi de composition des vitesses :
v=V+v′+x′(ω×i′) + y′(ω×j′)
=v′+V+ω×O′M
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%