Epreuve de Physique / Mécanique du Point II (PHY 12b)

!
!
1
Université Joseph Fourier Grenoble 1 Année 2013/2014
Licence 1ère année
1ère session
Epreuve de Physique / Mécanique du Point II
(PHY 12b)
13 mai 2014. Durée 2h
Documents et calculatrices ne sont pas autorisés.
Bien lire l’énoncé avant de commencer, cela peut-être très utile. Le sujet est composé de 4 exercices
indépendants.
N’utiliser les valeurs numériques que lorsqu’un calcul numérique est demandé, et penser à mettre les
unités, un résultat sans unité est inexploitable !
Ne pas confondre brouillon et copie, la présentation interviendra dans la note. Bien préciser le
numéro de la question.
(énoncé contenant 5 pages numérotées de 1 à 5)
!
!
!
!
!
!

!
!
2
Exercice I : Le pendule de Newton (5 points)
Ce pendule est constitué de trois boules rigides de masses m identiques, susceptibles
de s'entrechoquer et d'échanger quantité de mouvement et énergie. On considère que le
mouvement de chacune des boules est uniquement horizontal et que toutes les collisions sont
élastiques.
!
!
!
!
!
!
Avant la collision, la boule 1 a une vitesse 𝑉1, et les boules 2 et 3 sont immobiles et en
contact, comme illustré sur le schéma suivant :
!
!
!
!
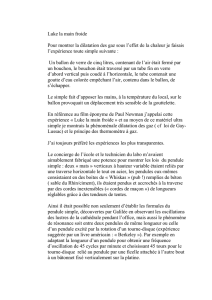
Au moment de la collision, la boule 1 entre en contact avec la boule 2, et après la collision, les
boules 1, 2 et 3 ont respectivement des vecteurs vitesse 𝑉’1, 𝑉’2, 𝑉’3 .
Après la collision, deux situations distinctes sont proposées ci-dessous :
Cas A : La boule 1 s’immobilise après la collision et les boules 2 et 3 se déplacent de façon
solidaire : 𝑉’1 = 0 et 𝑉’2 = 𝑉’3
!
!
!
!
1!
2!
3
1!
3!
2!
2!
3!
1!
V’3!
V’2!
=!
V’1=!0!
V1!

!
!
3
!
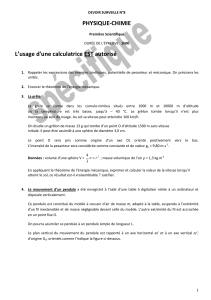
Cas B : La boule 1 s’immobilise après la collision, alors que la boule 2 reste immobile et que
la boule 3 acquiert une vitesse 𝑉’3 non nulle.
!
!
!
!
Le but de cet exercice est de démontrer qu’une seule de ces deux situations est susceptible de
se produire dans la réalité.
I.1 : Rappeler les grandeurs physiques qui se conservent au cours de cette collision. Justifier
rigoureusement chacune de ces lois de conservation.
I.2 : Ecrire les expressions mathématiques générales de chacune de ces lois de conservation en
fonction des données du problème.
I.3 : En considérant successivement les deux cas A et B, montrer qu’une des deux situations
aboutit à une solution mathématiquement impossible.
I.4 : Exprimer les vitesses 𝑉’2 et 𝑉’3 après collision des boules 2 et 3 dans le cas
correspondant à la réalité. Ce résultat était-il prévisible, pourquoi ?
Exercice II : Le pendule du radiesthésiste (4 points)
Un radiesthésiste maintient son pendule OM de longueur l par une extrémité O et
observe l’extrémité M qui décrit dans un plan horizontal un mouvement circulaire uniforme,
dans le sens trigonométrique, autour d’un l’axe fixe et vertical (O, O’) : le cercle décrit par M
est dans le plan horizontal (xO’y), de centre O’ et de rayon R, et la vitesse angulaire du
pendule dθ/dt est constante.
V’3!
2!
3!
1!
V’1=!0!
V’2=!0!

!
!
4
II.1 : Exprimer le rayon R du cercle décrit par M en fonction de la longueur l du pendule et de
l’angle constant α formé par le pendule et l’axe fixe et vertical (O, O’).
II.2 : Déterminer les composantes des vecteurs position 𝑂′𝑀, vitesse 𝑣M et accélération 𝑎M de
l’extrémité M du pendule en fonction de l, α et de la vitesse angulaire dθ/dt en coordonnées
polaires dans le repère d’origine O’ et de vecteurs directeurs 𝑢r et 𝑢θ. Tracer les vecteurs 𝑢r et
𝑢θ sur un schéma représentant la trajectoire de M dans le plan (xO’y).
II.3 : Exprimer le vecteur 𝑂𝑂’ en fonction de l et de α dans le système de coordonnées (O, 𝑢r,
𝑢θ, 𝑘 ), 𝑘 étant le vecteur directement perpendiculaire à (𝑢r, 𝑢θ ).
II.4 : En déduire les composantes des vecteurs position 𝑂𝑀, vitesse !!"
!" et accélération !!!"
!!!
de l’extrémité M du pendule en fonction de l, α et θ dans le système de coordonnées (O, 𝑢r,
𝑢θ , 𝑘 ) défini précédemment.
Exercice III : Le pendule de Tournesol (6 points)
Au cours d’une promenade sur la Lune, le professeur Tournesol a emporté son pendule
constitué d’une tige rigide d’extrémités O et A et d’une boule de platine de masse M fixée en
A. La tige est inextensible et de masse négligeable, de longueur l = 20 cm. Dans tout ce qui
suit, on négligera les frottements.
Le professeur Tournesol maintient son pendule par l’extrémité O et observe ses mouvements
d’oscillation dans un plan vertical (xOz) avec une période mesurée TLune= 2,22 s et un angle
θ(t) de valeur maximum mesurée θmax = 15°. Il vous demande alors de déterminer
l’accélération de la pesanteur à la surface de la Lune gLune en suivant ses conseils :
III.1 : Faire un schéma du pendule. Faire le bilan des forces extérieures appliquées au pendule
et donner leur expression en fonction des données du problème (l, M, θ(t) et gLune) dans un
système de coordonnées polaires (O, 𝑢r, 𝑢θ ) que vous dessinerez sur le schéma. Dessiner
également les forces sur le schéma.
III.2 : Déterminer les composantes des vecteurs position 𝑂𝐴, vitesse 𝑣A et accélération 𝑎A de
l’extrémité A du pendule en coordonnées polaires.
III.3 : Rappeler la définition du moment d’une force. Exprimer le moment de chaque force
s’exerçant en A par rapport au point fixe O dans le système de coordonnées (O, 𝑢r, 𝑢θ, 𝑘 ), 𝑘
étant le vecteur directement perpendiculaire à (𝑢r, 𝑢θ ).
III.4 : Rappeler la définition du moment cinétique. Déterminer les composantes du moment
cinétique de l’extrémité A du pendule en fonction des données du problème (l, M, θ(t) et
gLune).

!
!
5
III.5 : En appliquant le théorème du moment cinétique, en déduire l’équation différentielle
caractéristique du mouvement du pendule.
III.6 : Dans le cadre de l’approximation aux petits angles que vous justifierez soigneusement,
donner l’expression de la solution générale de cette équation différentielle et en déduire la
valeur de l’accélération de la pesanteur à la surface de la Lune gLune. Cette valeur vous parait-
elle cohérente avec les bonds extraordinaires que le professeur effectue sur la Lune ?
Exercice IV : Vibration des bâtiments et tremblement de terre (5 points)
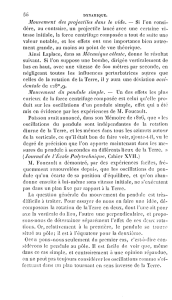
Les bâtiments sont soumis à des sollicitations vibratoires diverses, dont celles des
tremblements de terre. On s'intéresse au cas d'un château d'eau, que l'on représente comme
une masse M de 150 tonnes située au-dessus du sol et fixée à l’extrémité d’un ressort de
raideur k = 7,7×106 N/m, susceptible d'osciller horizontalement le long d'un axe Ox, l'origine
correspondant à la position d'équilibre du château d'eau (Fig. 1).
!
Fig. 1 : château d'eau et sa représentation simplifiée comme un oscillateur harmonique horizontal
IV.1 : Compte-tenu des caractéristiques du château d'eau, quelle est la période d'oscillation
propre, T, de l'oscillateur harmonique associé ?
IV.2 : Rappeler la forme générale de la fonction x(t) donnant la position d'un oscillateur
harmonique de période propre T et d'amplitude x0 ;
IV.3 : En déduire l'expression de l'accélération a(t) ; quelle est la plus grande valeur a0 que
puisse prendre l'accélération au cours du mouvement ? Calculez celle-ci dans le cas ou x0 = 10
cm.
IV.4 : Tracer sur un même graphe comportant deux échelles des ordonnées (une à droite et
une à gauche) les courbes représentatives de x(t) et a(t). Justifier, sur la base des propriétés
mécaniques d'un ressort et du principe fondamental de la dynamique, le signe relatif des
position et accélération.
1
/
5
100%