mecanique i - Université Virtuelle de Tunis

Ministère de l’Enseignement Supérieur, de la Recherche Scientifique et de la
Technologie
Université Virtuelle de Tunis
1
M Hichem Trabelsi
MECANIQUE I
PRINCIPES DE LA DYNAMISME DU POINT
MATERIEL
Habib Bouchriha, Zeineb Benahmed, Dhouha Gamra, Ridene Saïd
Attention !
Ce produit pédagogique numérisé est la propriété exclusive de
l'UVT. Il est strictement interdit de la reproduire à des fins
commerciales. Seul le téléchargement ou impression pour un
usage personnel (1 copie par utilisateur) est permis.

Principes de la dynamique du
point matériel
Isaac Newton fonda la mécanique sur trois lois quil appela : loi de linertie,
loi des forces en action et loi des actions réciproques. Ces lois, qui ne sont
valables que dans un référentiel galiléen, sont couplées entre elles et sont
devenues des principes connus et enseignés sous le nom de : "Principe de
linertie", "Principe fondamental de la dynamique" et "Principe de laction
et de la réaction".
Après avoir évoqué lexistence et le caractère approximatif du référentiel
galiléen, nous allons présenter, dans ce chapitre, les trois principes de la mé-
canique pour un point matériel et discuter de la limite de leur validité. Nous
aborderons ensuite létude du principe fondamental de la dynamique pour
un point matériel dans un référentiel non galiléen et nous montrerons que
ce principe demeure valable, à condition dajouter aux forces réelles appli-
quées à ce point, les forces dinertie résultant des e¤ets dentraînement et de
Coriolis.
1. 1. Référentiels galiléens ou dinertie
Ce sont des référentiels en translation rectiligne et uniforme par rapport
à un référentiel supposé "xe". Pour choisir ce référentiel xe ou approxi-
mativement xe, plusieurs possibilités sont envisageables suivant la durée du
mouvement et lintensité de son accélération.
*Le référentiel terrestre
Un référentiel lié à la Terre nest pas tout à fait galiléen en raison de la
rotation journalière de la Terre autour de la ligne de ses pôles qui se¤ectue
en 24 heures avec une vitesse angulaire !1=2
24 3600 = 7;29:105rad:s1.

2
Cette rotation induit une accélération centripète qui vaut, à léquateur :
(1)
e=!2
1RT'3;4:102m:s2
Cette accélération est faible devant laccélération de la pesanteur
(g= 9;8m:s2)mais elle est non négligeable. De ce fait, un référentiel ter-
restre pourrait constituer approximativement un référentiel galiléen pour un
mouvement se¤ectuant pendant une durée courte devant une journée et dac-
célération très supérieure à (1)
e.
*Le référentiel géocentrique
Une autre approximation consisterait à prendre un référentiel dori-gine
le centre de la Terre, daxe !
Oz laxe Nord-Sud des pôles et daxes !
Ox et
!
Oy dirigés vers des étoiles lointaines "xes". Ce référentiel est di¤érent du
référentiel terrestre car on ne tient pas compte de la rotation de la Terre sur
elle-même et on considère uniquement sa rotation autour du Soleil qui est
décrite par une ellipse de faible excentricité située dans un plan passant par
le centre de gravité du Soleil appelé plan de lécliptique et faisant un angle
de 23270avec le plan équatorial. La période de cette rotation est égale à une
année ('365jours) et sa vitesse angulaire est
!2=2
365 24 3600 = 2:107rad:s1. Ce référentiel est également accéléré
car cette rotation annuelle induit une accélération centripète du centre de
la Terre de lordre de (2)
e=!2
2D'0;58:103m:s2, D étant la distance
Terre-Soleil (D'1;5:1011m). Toutefois, ce référentiel peut être supposé
en translation rectiligne et uniforme et considéré comme galiléen pour des
mouvements se¤ectuant pendant une durée limitée (de lordre de la journée)
et avec des accélérations supérieures à (2)
e.
*Le référentiel de Copernic
Une meilleure approximation du référentiel galiléen serait de prendre un
référentiel centré au Soleil et dont les trois axes sont dirigés vers des étoiles
lointaines "xes", cest le référentiel de Copernic. Cependant, le Soleil dé-
crit lui-même une orbite courbe autour du centre de notre Galaxie de rayon
moyen 3:1020men 2:108annees et avec une accélération (3)
ede lordre de
2;4:1010m:s2et on peut considérer dans ce cas que le Soleil est en mouve-
ment de translation rectiligne et uniforme si on confond sa trajectoire avec
sa tangente.
*Le référentiel galactique !
On pourrait imaginer de prendre pour référentiel xe un référentiel dori-
gine le centre de notre Galaxie et daxes xes. Pourtant, la Galaxie elle-même
nest pas immobile dans lespace intersidéral ! et décrirait probablement une

3
orbite courbe autour du centre de lUnivers.
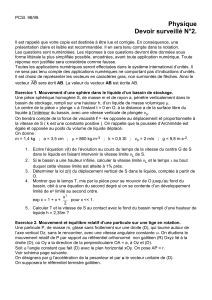
R
G
= 3.10
20
m
Galaxie
Soleil
Terre
R
S
= 1,5.10
11
m
T = 365 jours
T = 6,3.10
15
s
Fig.6.1. : Orbite terrestre autour du Soleil et orbite solaire autour du centre de la
Galaxie
En conclusion, il nexiste pas de référentiel xe et par voie de
conséquence de référentiel galiléen exact. On utilisera néanmoins, selon
la durée de lévènement étudié, lintensité de laccélération du mouvement et
la précision de sa mesure, lun ou lautre des référentiels précités.
Toutefois, en mécanique classique telle que nous létudierons, il est dusage
de considérer comme référentiel galiléen ou dinertie tout référentiel en trans-
lation rectiligne et uniforme par rapport au référentiel de COPERNIC.
2. 2. Principes de la dynamique dun point
matériel
Se basant sur les travaux de Galilée et sur ses observations et analyses
propres, Newton énonce les trois principes suivants qui constituent les prin-
cipes de base de la mécanique classique.
2.1. 2.1 Première loi de Newton ou Principe de liner-
tie
2.1.1 2.1.1 Enoncé du principe
Une particule isolée, si elle est au repos,elle restera inniment
au repos, si elle est en mouvement, son mouvement ne peut être
que rectiligne et uniforme.
Le vecteur vitesse !
Vde la particule est donc constant. En e¤et :

4
- si !
V=!
0: la particule demeure au repos,
- si !
V=!
V0: la particule a un mouvement rectiligne et uniforme.
2.1.2 2.1.2 Limite de validité
Il est évident que la notion de particule isolée, cest-à-dire non soumise à
des interactions extérieures, est une ction de lesprit ; en e¤et, le fait même
de lobserver et danalyser son mouvement, on interagirait avec elle. Pour
que la particule soit vraiment isolée, il faudrait quelle soit la seule et unique
particule dans lunivers, ce qui est une utopie ! et on ne serait pas là pour
mesurer son mouvement.
Ce principe demeure toutefois applicable lorsque la particule est su¢sam-
ment éloignée des autres pour que leurs interactions soient négligeables ou
lorsquelle est soumise à des interactions qui se compensent mutuellement.
Ce principe est appelé principe de linertie car linertie est la qualité de la
matière qui la fait sopposer à tout changement de mouvement en labsence
dune action extérieure.
Enn, comme la quantité de mouvement (!
p=m!
V) est un vecteur qui
décrit létat dynamique de la particule, le principe de linertie peut aussi
sénoncer ainsi :
" La quantité de mouvement dune particule isolée est nulle ou
constante".
2.2. 2.2 Deuxième loi de Newton ou Principe fonda-
mental de la dynamique
2.2.1 2.2.1 Enoncé du principe
On considère une particule non isolée, cest-à-dire subissant des interac-
tions du milieu extérieur, on dit alors quelle est soumise à une force !
Fqui
décrit ces interactions. Sous laction de cette force, il y a changement de
mouvement de la particule et donc variation de son état dynamique. Il en
résulte alors une variation de la quantité de mouvement qui caractérise cet
état.
La deuxième loi de Newton relie la force !
Fà la variation de la quantité
de mouvement par léquation :
!
F=d!
p
dt (1)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
1
/
44
100%