Cours n°20 : Moment cinétique d`un point matériel

Cours n°20 : Moment cinétique d’un point matériel
Pour étudier des systèmes physiques pouvant se réduire à un point matériel dans un champ de force central
(force dirigée vers un point fixe) comme une planète qui tourne autour du soleil retenue par la force
gravitationnelle, la RFD pourrait suffire, mais la notion de moment cinétique s’avère très pertinente car il est
alors une quantité conservée. Il faudra alors comprendre en parallèle la notion de moment cinétique et la
notion de moment de force, ces deux quantités sont reliées par un théorème, le théorème du moment
cinétique, comme le sont quantité de mouvement et force par la RFD.
On commencera par reprendre l’étude du pendule qui est soumis à une force centrale la tension du fil et à
une force qui dérive d’une énergie potentielle le poids, pour montrer qu’on peut dans ce cas aussi tirer profit
du TMC. On fera ensuite l’étude des problèmes de mécanique céleste, on pourra ainsi comprendre comment
on change d’orbite ; les voyages spatiaux mettant en jeu des problèmes à N corps (N astres) ne peuvent
recevoir qu’une solution numérique, mais les trajectoires du début et de la fin de ces voyages lorsque l’on
est dans la sphère d’influence d’un seul astre obéissent aux calculs que nous mèneront dans cette leçon.

I) Moment cinétique
1) Moment cinétique d’un point matériel M par rapport à un point fixe O
( ) ( )
OO dOM
M L M OM mv OM m dt
Il s’agit d’un produit vectoriel le résultat est un vecteur.
2) Moment d’une force
, la force() étant appliquée en M.
O
M F OM F
Prendre le moment d’une quantité, c’est opérer
OM
sur cette quantité, la quantité de mouvement est une
quantité cinétique on parle de moment cinétique, la force donnant lieu au moment de force.
11
21
1
22
( ) . ²
EW
c'est la meme dimension que celle de h la constante de Planck E=h h = W F.dOM F ma ²
. ² [ ] l
O
O
M L MLT ML T
T T T L T L TMLT L ML T
T
M OM F OM ma L MLT ML T W
a dimension d'un moment de force est celle d'une énergie (ou d'un travail qui est unevariation d'energie)
Un moment se réfère à un point de calcul lequel est rappelé en indice, dans ce cours ce point est toujours
fixe
( ) + + ( ) la force étant toujours appliquée en M
AO
M F AM F AO F OM F AO F M F
3) Théorème du moment cinétique en un point fixe O.
: 0 ( )
' la D
( ) ( )
RF
O O i
i
Oi
i
d d d d
preuve OM mv OM mv OM mv OM mv v mv OM ma M F
dt dt dt dt
da
dM M F
d
p
t
rès
Remarque : En mécanique du point il y a équivalence entre RFD et TMC, en mécanique du solide on montre que les deux
théorèmes sont nécessaires et complémentaires.
4) Moment cinétique d’un point matériel M par rapport à un axe orienté et moment
d’une force par rapport à ce même axe, TMC scalaire.
( ) . ( ) .
( ). ( ). car un vecteur constant qui peut rentrer sous le signe de dérivation
on définit les quant
O z O i z
i
O z O i z z
i
dM u M F u
dt
dM u M F u u est
dt
, i,O,z
, i,O,z
ités scalaires ( ). et M ( ). on a le théorème scalaire du moment cinétique
M avec toujours O point fix , z est choisi comme étant l'axe de rota
O O z O i z
z
Ozi
M u M F u
d
dt
tion
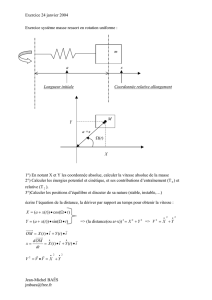
5) Exemple du pendule simple
( ) ( ) ( )
² cos sin
²
O O i
i
r r r
z r x y r r
z
dd
M M F OM mv M OM P OM T
dt dt
dru m ru r u OM P OM T
dt
dmr u ru mg u u ru Tu
dt
ml u
cos sin 0 sin compte tenu de ce que r = l =cste
² sin 0 sin 0
r r z
lu mg u u mgl u
g
ml mgl l
ur
u
O
r = l
T
P
- l cos
z
x
y

L’action de contact T disparait dans l’utilisation du TMC
6) Genèse du TMC, intérêt l’action de contact disparait tout comme avec la conservation
de l’énergie
Le TMC a donc permis d’obtenir l’équation du mouvement d’une façon équivalente et alternative à la RFD
ou à la conservation de l’énergie ;
- son intérêt par rapport à la conservation de l’énergie est de faire apparaitre directement l’équation du
mouvement du second ordre sans avoir à dériver comme dans la conservation de l’énergie.
- son intérêt par rapport à la RFD est que l’action de contact T disparait naturellement.
7) Moment d’une force explication physique
Expérience Mathilde met David à la porte !
Une force suffit à décrire le mouvement d’un point matériel par contre pour décrire le mouvement d’un solide elle est
insuffisante, il faut prendre en compte le moment de la force.
Considérons par exemple une porte qui tourne autour de l’axe de ses gonds :
L’expérience montre que deux quantités sont pertinentes dans la mise en rotation de la porte, la distance HM et l’intensité de
la composante de la force perpendiculaire à la porte.
O est un point sur l’axe des gonds. H est le projeté orthogonal du point d’application de la force M sur l’axe de rotation.
//
// //
()
( ) ( ). ..
.
O
O
moment vectoriel M F OM F
momet sc OM F k OH HM F F k
OH F HM F OH
a
F
laire M F M F k
HM F k HM F
).
.
(M F HM F
k
Ces deux quantités apparaissent dans le moment scalaire
On peut alors penser la genèse du TMC comme suit : pour décrire les mouvements de rotation le moment de force est pertinent,
définissons aussi le moment cinétique (tant qu’on y est). Tiens ! Il devait y avoir une relation entre le moment cinétique et le
moment des forces, comme il existe une relation entre la quantité de mouvement et les forces, c’est la RFD ; cette relation à la
même structure, on dérive la quantité cinétique (qui décrit le mouvement) pour trouver la quantité dynamique qui cause le
mouvement.
8) Remarque
Levier, conservation de l’énergie travail à gauche = travail à droite
le moment à gauche est identique au moment à droite
en valeur absole
si on multiplie par d on trouve d d
d est le déplacement à gauche
d est le déplacement à droite
qui traduit
gd
Fd fD
Fd fD
d
D
alors W W
la conservation de l'énergie
Le phénomène semble alors moins paradoxal
H
F
M
O
//
F
F
k
D
d
F
f
O

9) Pendule paramétrique, de l’utilité du TMC ou apprenons à faire de la balançoire
Considérons un pendule simple de longueur variable l(t) réalisé à l’aide d’un fil inextensible MOA coulissant à
travers un anneau placé en O et dont l’extrémité A est animée d’un mouvement sinusoïdal de faible amplitude
l(t) = l0 [1+ cos t] avec <<1
1) Calculer le moment cinétique du pendule en O LO
2) Calculer le moment en O des forces appliquées MO
3) Appliquer en O le théorème du moment cinétique
4) En se limitant aux oscillations de faible amplitude (on pourra assimiler angle et sinus de l’angle) et en se limitant
au premier ordre en montrer que l’équation en est de la forme :
(d²/dt²) + 0² = [0² (t).cos( t) + 2 (d /dt) sin ( t)] avec 0 = √ (g/l0)
5) Multiplier cette équation par d/dt et présenter son membre de gauche sous la forme :
d/dt [ ½ (d/dt)² + ½ 0² ²]
6) On recherche une solution de la forme (t) = A(t) cos ( 0 t + )
On supposera que la variation de A(t) est lente ; c’est à dire que l’on on pourra négliger les termes en dA/dt devant
les autres En déduire que : (d/dt) ² + 0² ² = 0² A(t)²
7) En reportant dans l’équation obtenue à la question 5 en déduire une équation sur A². Dans le membre de droite on
pourra encore négliger les termes en dA/dt devant les autres.
8) L’énergie moyenne E de l’oscillateur sur une période (si l’on suppose comme c’est le cas les variations
d’amplitude maximales lentes) est proportionnelle à A². Calculer la variation relative
1/E (dE/dt)
9) Montrer que pour que la moyenne de1/E (dE/dt) sur plusieurs périodes soit non nulle, on doit avoir = 2 0.
Nous avons étudié ici le principe d’oscillation de l’encensoir de Saint-Jacques de Compostelle. Les moines se lèvent et
s’accroupissent deux fois par oscillation. La balançoire est un oscillateur paramétrique qui fonctionne sur le même principe : on
déplace son centre de gravité en se levant en haut de la trajectoire et en s’asseyant en bas de la trajectoire. On fait donc varier la
distance au centre de rotation tout comme si on faisait varier la longueur du pendule.
( ) ²
( ) ( cos sin ) sin pour les petites oscillations
Théorème du moment cinétiqu
Or
rz
O r r z z
dl d d
L OM mv lu m u l u ml u
dt dt dt
M P OM mg lu m g u g u lmg u lmg u
00
0
0
e ( )
²
( ² )) ( ² ) 2 ² ²
²²
2 2 sin (1 cos )
²²
²
2 sin (1 cos ) ²
²
OO
zz
dL M P
dt
d d d d dl d d
ml u lmg u l lg l l lg
dt dt dt dt dt dt dt
dl d d d d
l g l t l t g
dt dt dt dt dt
d d g
tt
dt dt l
0
00
00
²²
² cos 2 sin 0
²²
² ² ² ²
² ( cos 2 sin ) ² ( cos 2 sin )(*)
² ² ² ²
²²
cette équation montre que ² ( ) soit que ² ()
²²
si on
d d d
tt
dt dt dt
d d d d d d
t t t t
dt dt dt dt dt dt
dd
dt dt
00
00
²
reporte dans la meme équation (*) ² ( cos [ ² ( )] 2 sin )
²
²
on obtient : ² ( ² cos 2 sin ) ( ²)
²
dd
tt
dt dt
dd
tt
dt dt
Moines
l(t)
O
A
M

10) Pendule sphérique dans le champ de pesanteur uniforme
Les festons, cas particulier : mouvement circulaire,
Quand les problèmes sont complexes, il est agréable de bénéficier de quantités conservées ; on pourra avoir
par exemple l’énergie si toutes les forces sont conservatives .
Dans le problème du pendule sphérique suivant on a aussi conservation de la composante du moment
cinétique selon la verticale.
Avec la conservation de l’énergie, on a alors un système complet d’équation différentielles.
1) Retrouver l’expression du déplacement élémentaire en coordonnées sphériques
2) En déduire l’expression de la vitesse dans la base sphérique.
Un pendule simple est constitué d’un point matériel de masse m attaché à un fil souple inextensible de
longueur l, fixé en un point O, origine d’un repère (O,x,y,z) du référentiel terrestre supposé galiléen. L’axe
Oz est choisi vertical ascendant et on utilise les coordonnées sphériques (r, , ) de centre O et d’axe Oz.
Les conditions initiales étant quelconques, mais supposées connues, on cherche à étudier le mouvement du
pendule dans le cas où le fil reste toujours tendu.
On choisira la constante de l’énergie potentielle de pesanteur de telle sorte que Ep (z =0)=0
3) Traduire la conservation de la projection du moment cinétique sur l’axe Oz et expliquer pourquoi il en est
ainsi. On notera celle-ci L0z
4) Traduire la conservation de l’énergie mécanique que l’on notera E0
5) Donner l’équation différentielle à laquelle obéit
6) Projeter la Relation Fondamentale de la Dynamique sur le vecteur radial. On admettra que la composante
radiale de l’accélération en coordonnées sphériques s’exprime comme:
d2r/dt2 - r . [ ( d/dt)2 + (sin2 ) . (d/dt)2]
En déduire que si est supérieur à /2 alors le fil est tendu
7) Poser u = cos ainsi que A = -2m2g l3/ L0z2 et B = 2m l2 E0 / L0z2 dans l’équation différentielle obtenue au
(5) et montrer que le mouvement n’est possible que si A.u + B > 1 / (1-u2)
8) On se restreindra au cas où reste supérieur à /2. Une résolution graphique où l’on portera u de -1 à +1
sur l’axe des abscisses permettra alors de montrer que le point matériel peut avoir deux types de
mouvements.
- Soit il décrit sur la sphère des festons compris entre deux cercles parallèles d’angle limites 1 et 2
dépendant des conditions initiales. On montrera graphiquement comment on peut obtenir 1 et 2.
- Soit il décrit un cercle. On montera graphiquement comment on obtient la valeur de associée.
Sur les sites suivants, on verra différents exemples de mouvement selon les conditions initiales :
http://www.mathcurve.com/courbes3d/pendulespheric/pendulespheric.shtml
https://www.youtube.com/watch?v=Ksi5hR5w9_I&list=PL0F8E8849BC6FDEAF
O
z
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%